ad2) OK?
#if DEBUG_PRINT_I_SUM
print_s_p(PSTR(" Is: "));
print_hexXXXX(sumError);
print_s_p(PSTR(" Ic: ")); //jr
print_decXXXX(CTL_interatorCredit);
#endif
3. How can I set Is after reboot manually to a certain value (necessary
during testing). Do we have a COM command or any other way ... ? Can we
use the EEprom edit mechanisem some how ??
Richard,
I almost accept your notices. Only one difference is hex output for
CTL_interatorCredit, reason is missing support for decimal numbers<0.
Jiri
Jiri did you accept 1 & 2 ???!!!
(I thought credit is only poistive ...)
How can I achieve 3 ??
4. How come - see sumerror
D: d6 19.03.11 09:41:08 M V: 56 I: 2317 S: 2300 B: 2707 Is: e1f0
D: d6 19.03.11 09:45:08 M V: 56 I: 2317 S: 2300 B: 2706 Is: e168
D: d6 19.03.11 09:49:08 M V: 56 I: 2317 S: 2300 B: 2705 Is: e0e0
THX: just verified the changes ;-)
bat voltage display has a prob = shows only 2. instead of 2.123
LCD_Print
1
Char
(bat_average/1000, 2, LCD_MODE_ON);
LCD_PrintDec(bat_average/100, 2, LCD_MODE_ON);
LCD_PrintDec(bat_average%100, 0, LCD_MODE_ON);
Jiri please stay with /100, because this way I see wether accu is
charging or discharging earlier (I charge them from PLC) THX
pls comment on 3 & 4
Regarding alternate and service watch from one of the last posts should
no be left automatically (because we want to watch a certain parameter
for a longer time ;-) menu.c 125:
@Richard: I have to wait until I get my jtag programmer back.... don't
know how long it will take....
BTW: The rondostat at which I caused the short circuit keeps running
into E3 error.
Question: When is battery voltage meassured? For me it looks as if it is
read only at startup, because that coult perhaps explain the wrong
voltage (?)
@Jiri: There is no other power source:
- At the other rondostats which are mounted at the radiators, there is
an external circuit connected which captures the serial data and sends
values using rfm12. It gets its power from the rondostat. So it will
perhaps add capacity, but it definitly is no power source ;)
- The logic analyzer is connected to gnd and tx pin, but it has high
impedance inputs, no pullups and so on.
batt voltage show only 2. ? For me it is correct, show 2.55.
You don't need 3) it is almost equal to config.valve_center. Difference
is only in units. Problem is that we don't have free flash for any
useful idea.
Every Sat on 10:00 is automatic recalibration. It is useful also for
keep valve heath.
I change battery voltage in LCD back to mV without decimal point.
battery voltage is measured every second. Presented value is average
from last AVERAGE_LEN (= default 15) values
men you are fast THX "mV"
Regarding alternate and service watch from one of the last posts should
no be left automatically (because we want to watch a certain parameter
for a longer time ;-) menu.c 125: } else if (( kb_events &
KB_EVENT_NONE_LONG ) &&
! (menu_state>=menu_home2 || menu_state<=menu_home5 ||
menu_state==menu_service_watch)) {
ad3) in my case different heaters have quite different valves, so for
testing purposes it would be great to start with manual set Is by COM or
LCD. I thought during debuggin it would be quite helpfull to be able to
manipulate static variables or variables from service_watch
Jiri Bat display does not work for me with CHAR. I press middle button
right after version string and DATE skip define is set ! Display shows
10:00 (no clear screen) and when first bat calc is done the left 0 looks
like this
-
-
I connected a rondostat to a variable power source. When it callibrates
and I change power, the motor of the rondostat gets slower or faster,
but it returns to its normal speed after a very short time (a second or
so).
So the voltage messurment seems to work.
Strange1:
I set it to 3.0V, but it displays "batt". Why? Is this condition cleard
automatically when voltage rises, or only at reset or button-event?
Strange2:
Serial Output reports a voltage of 3,06V now.
Multimeter says 3,06V too (hm, very precise, it was rather cheap....)
Power-Supply is set to 3,0V.
=> All correct.
But when it was on batteries, the same rondostat showed 3,2V (serial)
while real voltage was 2,8V.
I set power supply to 2,8V now. Serial reports 2,87V now.
I set power supplay to 3,5V, serial reports 3,5V.
Connected batterys while power supply is still connected to prevent
reset, then disconnected power supply. Serial shows 2,8V, real voltage
is 2,8V. Still shows batt.
Removed and reinserted batteries to do a reset. Real voltage is still
2,8V
. Batt-Message is gone, serial output reports 3,55 or more volts. Motor
speed seems to be lower and when it starts the boost is barely there.
Switched on power supply (3V), batteries still in the rondostate. Serial
still shows 3,55V or greater.
bat displays are not reversible (except reboot or #define). Once voltage
droped below 2,4 bat warning comes on. Low bat is 2.0.
On my defect valve I also could not reproduce the situation ... I gues
if you try it several times (powerless in between each time!!) with
powersupply you will get wrong readings there as well
- battery warning and error is not reversible by good reason. Battery on
end of life usually refresh voltage without stress. In this situation is
show low voltage information only when motor runs. I want to keep this
information.
- I fix "char" problem on voltage on LCD.
Richard: You are right about mistake in comment about Saturday automatic
recalibrate.
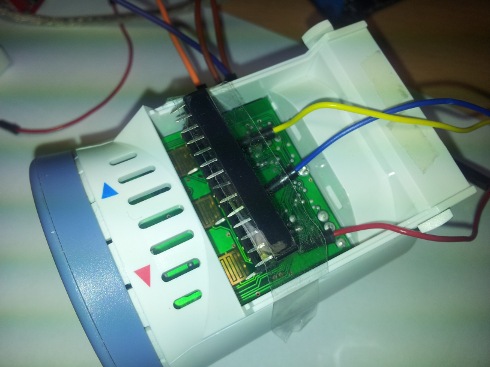
Chris: I don't have any idea why batteries is measured wrong and
external power supply is OK. I am not able repeat this problem. Maybe
some difference on PCB? Just idea, can you compare your PCB with photos
and other documentation?
Jiri: 339 bat display OK, but we have a : in display (before we had a .)
a) Do we realy need the Highword of summerror .. it is FFFF or 0 and if
it is ffff the lowword will start with f..a anyway ?? But it is cleaner
code of course ;-)
b) It would be quite usefull, if one could choose, that
alternate menue (middle button) and watch menue do not return
automatically to main menue. This way one could watch a specific
parameter without warming up the valve (by pressing the buttons all the
time) ... and it would be a lot easier during testing our valve setup
...
I hope to convice you ;-) menu.c 125:
":" in voltage fixed
a) it could be 0x00012345 or 0xffff2345. Low word is same, but meaning
is different
b) I want to have automatic return to main_menu. You can create change
on your sources and it will kept after "svn update" command.
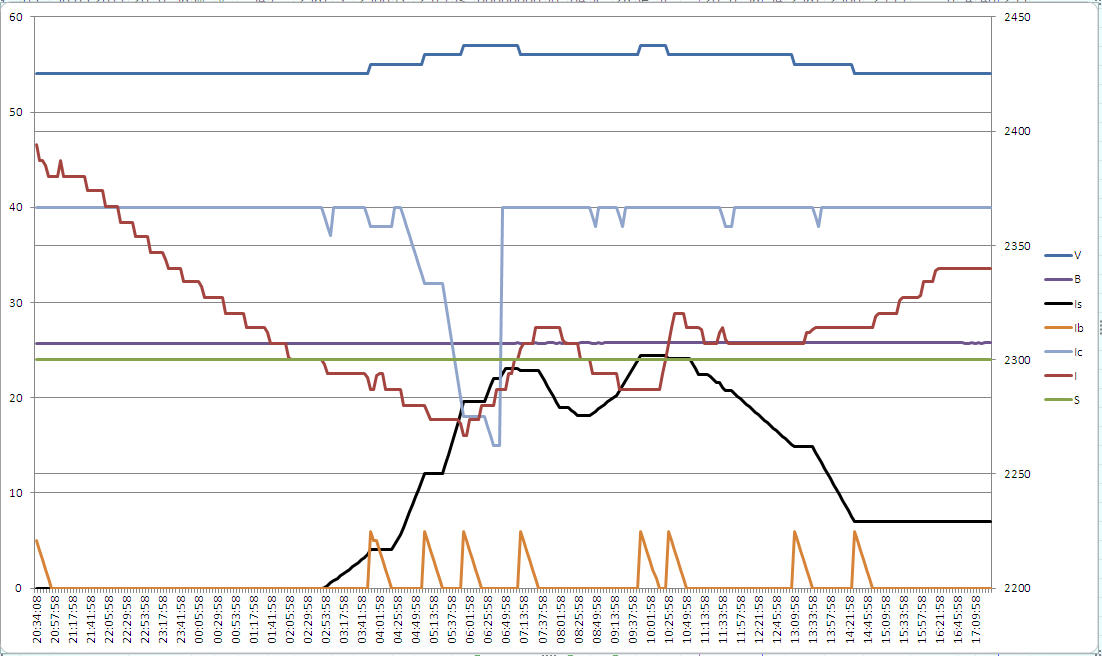
c) what is wrong on this log? PS: create chart in OpenOffice or Excel is
sometimes useful.
a) What was your maxsumerror so far ? mine typ. stops at ffff a/9
b) I tried snv commands some time ago, but it doesnt work in some of my
network surroundings (proxy,firewall,...), so I have to patch al my
changes all the time
hope to convince you at least to:
strange is this part:
D: d6 19.03.11 09:57:08 M V: 55 I: 2324 S: 2300 B: 2701 Is: df60
D: d6 19.03.11 10:01:08 M V: 59 I: 2324 S: 2300 B: 2694 Is: ff40
what happen at this time?
R341: Jiri, why should autocalib need new sumerror. 99 times out of 100
;-) calib stays about the same ! This way every saturday it gets to hot
or to cold at 10:00. I think giving credit is good enough !!
Only if valve is taken from head (E2) we should reset sumerror ...
Richard,
Calibration is same only on same conditions. But normally last
calibration is 1 week old. And it depend to battery, heater tempterature
atc.
But you are right, last value can be better than 0. I will create option
for it.
THX and a beer for R342:
Yes regarding impact of max 50%, but you agree that most times autocalib
will bring about the same results ... so we do not need sumerror=0 here
!! giving credit to adapt little changes will be good enough. (in my
case 5% change mean 1-2°C more/less in the room. min/max/center are
quite different on my heaters; they also have different valvetypes)
Only if valve is taken from heater (E2) we should start all over again
with sumerror=0
R343: Why not ?
#if CyCL_RESETS_sumError
sumError=0; // new calibration need found new sumError
CTL_interatorCredit=config.I_max_credit;
integratorBlock= DEFINE_INTEGRATOR_BLOCK (or eeprom)
#else
CTL_interatorCredit=config.I_max_credit;
integratorBlock= DEFINE_INTEGRATOR_BLOCK (or eeprom)
#endif
When do we need the block ? Also here ?:
if (mont_contact & KBI_MONT) {
CTL_error |= CTL_ERR_MONTAGE;
sumError=0;
suggestion:
#if CyCL_RESETS_sumError
sumError=0; // new calibration need found new sumError
#endif
CTL_interatorCredit=config.I_max_credit;
______controller.c
if (CTL_interatorCredit==config.I_max_credit) {
integratorBlock=DEFINE_INTEGRATOR_BLOCK (or eeprom)
if (updateNow) {
Jiri, I verified all the changes compared to 339:
!!! VERY VERY WELL DONE !!!
Suggestion regarding controller:
1.Your new idea from last weeks regarding I part works well. But
sometimes an offset 0,1-0,2 stays. I know that is not much ;-). My
suggestion is to give credit, if error is around 0 (instead=0). Existing
code
if (absErr >= last2AbsError) { // error can grow only limited time
will prevent growth of sumerror anyway.
An Option could be to give the "tollerance credit" just once. But this
would produce more code ;-). This is why we should try this first:
((absErr==last2AbsError)&&(absErr<=I_0_TOLLERANCE))){//sign of last error16 != sign of current OR abserror around 0
4
CTL_interatorCredit=config.I_max_credit;// give credit
#define I_ERR_TOLLERANCE_AROUND_0 15 // unit 0,01°C. Set it quite
restrictive !
2. I suggest a define in controll.c 303:
CTL_interatorCredit-=(absErr/I_ERR_WEIGHT)+1; // max is
1200/25+1 = 49 impact of error on I part
#define I_ERR_WEIGHT 25 //impact of error on I part
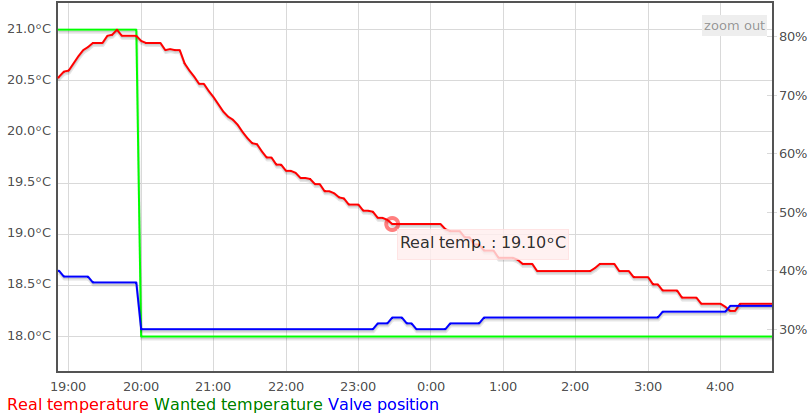
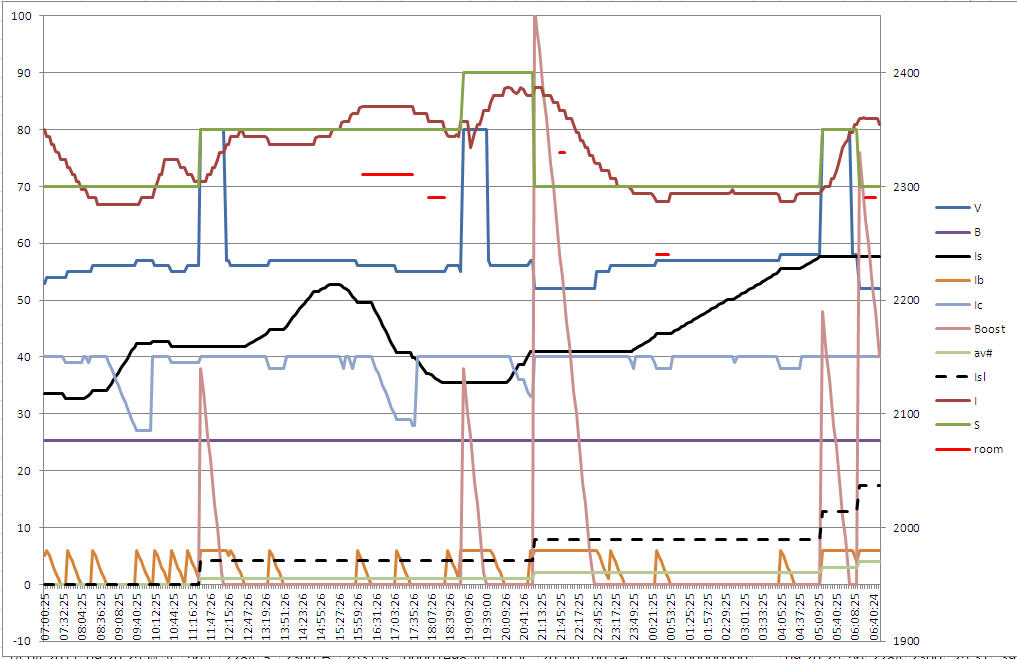
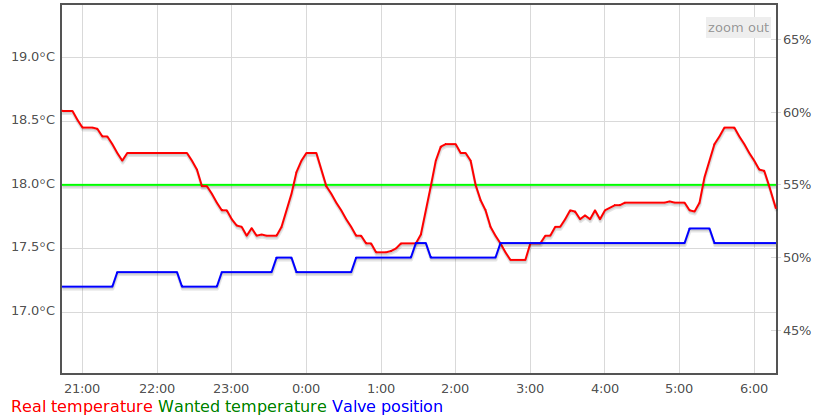
Hi Jiri,
I logged temperature and vent position in one room to see the
overheating in the morning. Here it is.
Any idea what causes the wrong battery messurements? Why is is it after
reset and not before with the same rondostat? Strange.
Chris
Hi,
I got my jtag programmer back and flashed rev 344 (without rfm12).
I hear the initial boost of the motor (I see you disabled compensation
in config.h, so wrong battery messurements should not be a problem any
more?)
Bat on lcd shows 3281, multimeter shows 2,89V.
Csn I use rev 344 as "productive" version, or won't it work?
Chris
I took the batteries in and out several times. There was nothing else
connected to the rondostat and I did not mount it. Here is the batt
output:
2,8V (ok)
3,5V
4,4V
5,4V
2,8
2,9
2,9
3,1
2,9
2,9
2,9
2,9
2,9
Could it be a bug somewhere in the firmware (ad-init?) or a bug of the
atmega itself?
I don't think it is a "defect" in hardware because it occurs only
sometimes and changes only on reset (not sure about this... I never
watched a rondostat whith wrong messurements correct itself without
reset... did you?)
I habe 6 rondostats with openhr20 that work like a charm (except for the
overheating problem in the morning which is in all rooms).
And I have 4 rondostates which are not mounted because auf E3 problem /
wrong voltage problem or wrong callibration byte so serial data is not
working. (how can I correct this?)
Chris, comments to your values:
You have externaly disabled heating and SW wan't to fix this error.
Mechanism to do it is integrator (old name was "zero error
compensation")
Problem is that current version of windup protection not help in this
situation (I will improve it later).
Soloution for you is set I_Factor to 0 and set valve_center very precise
manualy.
I thing that problem with regulator windup on "central heating off" can
be solved on Rev345. It need tests.
I have NO idea where is problem with bad battery measure. But I create
some debug, please enable DEBUG_BATT_ADC in debug.h and report me
result. (need SVN rev 346)
It s simple:
- when integrator credit is empty or temperature change I compare
current error with error on last change. If it isn't smaller than 1/2
change on integrator is reverted.
- integrator credit have limited lifetime
1. OK. Isnt the aim of CTL_interatorCredit and CTL_creditExpiration the
same. Both expire. The 3rd function is revert (I think its a good idea).
All 3 mechanisems have the same goal = prevent windup = right ?
This is why I dont understand why we need CTL_creditExpiration - pls
explain?
2. When do I have to change I_ERR_WEIGHT and when I_Factor ?
too slow? Try create chart in excel. I can't be better. :-)
We need 2 different
CTL_interatorCredit - allow maximum change volume, depend to integrator
change size
CTL_creditExpiration - allow maximum time
Jiri, I nearly expected your answer ;-) ... I am perfectionist ...
as you know ...
But right now I have the prob, that Summeroor, Ic and Ib in bathroom is
= 0 (I dont know Ie). Instead of 24 I have 26° = just P part active .. I
have no log and no idea so far ... maybe the gap is too big, as that it
is closed during credit/expiretime
2. When do I have to reduce I_ERR_WEIGHT and when increase I_Factor ?
Jiri:
a. if (absErr>=(lastTempChangeErrorAbs/2)) reverts too often ...
If just by chance the error is quite small we freeze wrong I part value
"forever". E.g. in some of my rooms (e.g.bathroom) I have a floor
heating as well. So it is not valve on its own who tries its best, doors
to other rooms sometimes stay open the whole day,...). In R351 valve
reverted quite often and ended up beeing controlled by P part close to
center. Bathrooom has 26 instead of 24 this way. So this "one time small
error" might be quite wrong, because it was produced by external
influences !!
Generell revert aim is to prevent wrong summerror produced by external
influences (shorten the time to correct I part). So aim is, to just
revert if really necessary ...
Suggetsion: revert if:
(absErr>=lastTempChangeErrorAbs) && (absErr>=I_REVERT_TEMP_THRESHOLD) &&
(lastTempChangeSumError>=I_REVERT_ERR_TRESHOLD)
#define I_REVERT_TEMP_THRESHOLD 50 //unit 0,01°C, revert only if error
is larger than e.g. 0,5°C. Dont go for small errors that by chance might
have been produced by external influece and will be stored "forever" !
#define I_REVERT_ERR_THRESHOLD 0x1000 //revert only if sumerror has
impact on valve move = do not revert on small values that have no impact
on valve position. This way even wrong sumerrors will be corrected
during the first periode, where external influence is gone.
b. expiration credit: do we relly need this ?
I understand, that aim is to stop valve during non heating periodes: If
no temp change occures, I part should be frozen to stop valve from
moving.
This is why I would like to set it to 24hours (no tempchange a whole
day) =24x60/4=360 but max is 255 ;-)
c) please answer 2. from last post...
Idea for "revert" is solve 2 situations:
Ex1: you want to heat more, but central heating is switched off.
Integrator will move valve. And we need detect this situation: we are
not able to heat up, valve position have no effect
Ex2: you need lower temperature, but temperature declines too slowly
(open door, external heat source) Situation is same, any change on valve
can't help. See too attachment
I both situation: any integrated change of valve is invalid, because it
can't have any effect
------------------------
expiration - Lets this situation:
22degrre in room, wanted temperature is 18. It take many hours to pass
20degrre and it leave valve_min position. Now valve slowly grow and
follow temperature decline. Without expiration, integrator will decline
valve without reason again to valve_min.
expiration in other words: If valve change have not effect in defined
time (default 2 hours!!!) we can't believe that measured error depend to
valve position. We must have impact from another source. Maximum
expiration is (255*4/60) = 17 hours Do you believe that measured effect
after 17 hours is caused by valve change?
------------------------
But you are right, condition (absErr>=(lastTempChangeErrorAbs/2)) can be
too strong. I will change it.
(absErr>=I_REVERT_TEMP_THRESHOLD) <= bad idea, compare it mainly with
Ex2, it will not work in this situation
(abs(lastTempChangeSumError)>=I_REVERT_ERR_TRESHOLD) <= tell me why?
What is a goal?
------------------------
"When do I have to reduce I_ERR_WEIGHT and when increase I_Factor?"
A: Anytime, and see whats happen. Frankly spoken, I don't know ideal
setting for this. It is too new, I have only limited data (only my
valves, only short time).
------------------------
Ideal solution for enable/disable integrator update is put all magic
like "credit" to trash and use "regression analysis" to determine rate
of valve change to temperature. It is perfect clear solution. But we
have limited resources in MCU. If you enable all options on code, free
space in flash is less than 0.5kB (less than 250 assembler
instructions!!) This is reason why I disable program/time settings by
valve wheel on wireless case. Now I have 1432bytes free flash. It make
it possible.
I will try create better mathematical model of valve (not just
calc/excel sheet) and try press some "regression analysis" into code.
But I am sure that end of heating season will be faster.
also today bathroom was reverted the whole day ....
idea a) and b) work togehter !
ad (abs(lastTempChangeSumError)>=I_REVERT_ERR_TRESHOLD) <= tell me why?
This way we just do a revert if the sumerror which we take for revert
has an impact on valve (the effect should be >= 1% ...)
e.g. we have stored a lastTempChangeSumError=0x050 at a
lastTempChangeErrorAbs=0,1°C. But those values were influenced by
externel source.
R351 will revert all the time 0x050 because abserr will be >
lastTempChangeErrorAbs=0,1°C most time. And when the ext. source is gone
abserror will get larger all the time ... As I is small 0x050 it has no
impact ... and I part is OFF "forever".
(abs(lastTempChangeSumError)>=I_REVERT_ERR_TRESHOLD) secures that we
just revert sumerrors that have a real influence (e.g. >=1%) on valve.
And if this lastTempChangeSumError was wrong (because of ext. influence)
it will lead to a larger error, which will not be reverted again because
of my condition a) !!!!!!!
I think A&B together will work for both examples, because we revert on
large errors.
my explanation was not quite OK.
b) on its own secures: Only revert values (e.g >0x1000) that have real
impact. So if stored values were wrong, the error will get worse and I
part will start working
a) if stored values were wrong, one of the next periodes for sure will
be able to reduce the error below 0,5°C(I_REVERT_TEMP_THRESHOLD) ... and
reverting will stop
I gave a&b a try for tommorow in bathroom
ad b) when I say "I part eill start working" I mean this part !
if (absErr >= last2AbsError) {
CTL_interatorCredit-=(absErr/I_ERR_WEIGHT)+1; // max is 1200/20+1 = 61
no chart ... log will come tommorow ....
goal of a)
Do not revert on small errors, this way valve can get out of REVERTING
by itself (it gets out of the trap if controller controls the error to <
0,5°)
If we dont limit the error REVERTING will last "forever" (e.g. if
lastTempChangeErrorAbs=0), because controller cant do any better. But if
the sumerror stored is wrong controller is in the trap!!)
b) only revert if I part has influence on controller. small summerrors
have no effect on valve position. Only P part works. Large values have
real influece on position. So if wrong (large) summerror will be
reverted, position will be worse then before (when the ext. source was
active). This way I part "if (absErr >= last2AbsError)" will start
working on this error and next time abserror will be <0,5 and reverting
will stop....
(absErr>=lastTempChangeErrorAbs) && (absErr>=I_REVERT_TEMP_THRESHOLD) &&
(abs(lastTempChangeSumError)>=I_REVERT_ERR_TRESHOLD)
1. V starts with 43 (center= 58, Min=42) through P part
23.03.11 23:41:42 Ic is used up but V is 44 now:
So I_Factor should be increased to at least compensate the loss on P. We
should have V<42 there.
Jiri we should increase I to 35
2. 24.03.11 04:03:03 Tempchange to 2300:
summerror stays as Vmin is reached. room is heated up by floor heating,
...
no revert was necessary > no revert done > OK
bathroom during last night: Vmin=40, Center=58, I=35
heater stops heating about V=41
At the beginning valve was warmed up from my hands... I think I is still
to low ?!
Richard, why do you set Vmin too close? This result is not surprise,
controller disable integration if valve is out of range and in your case
it usual situation. Except this, valve calibration depends to battery
status, and with this setting is easy to see valve on Vmin and heating
warming.
Jiri, I thought battery should not interfear, beacause we count pulses
... ?
Actually I set Vmin = VheaterOFF - 4. This way I part cant "wind down".
-4 was good enough so far to compensate the calibration tollerances
which usally are not more than 2.
If you read the bathroom logs, be aware that bathromm has floor heating,
hand towel hater (with normal valve, shuts down about 26°C) and the
heater controlled by hr20. And if door is opened temp slowly goes down
to 24. This room is perfect for testing the reverting prob I had with
R351 ;-).
Valve calibration depend to battery because maximum force depend too.
It is simple, motor controller try to keep same speed till slow down on
"close end" (Ad3 state). Problem is that maximum force depend to battery
state (maximum PWM is constant). I my valves valve range is ~600pulses
end to end with fresh batteries and ~480pulses with end of live
batteries.
(if you need exact position of valve, try to find "manual calibration"
in this thread)
Jiri,
- #define WATCH_N (10) should be (11) (values 0..0a)
- why dont we start autocalibration with searching CLOSE first. This way
one could manually set head to CLOSE, mount valve, valve checks that it
cant go any further and store this manually set CLOSE, then valve goes
to OPEN. This way we could reproduce the CLOSE position in automatic as
well .. ?
WATCH_N you are right, fixed
Calibration starts to "OPEN" direction by few reasons:
- when valve is on "CLOSE" side, force to start closing depend to valve
position. I will create calibration depend to position on start
salibration.
- when valve is "CLOSE" side, it can be on position, where motor have
not force to reach. In another word, manually you can brace stronger
than motor.
Where is benefit if you store automatic calibration in EEPROM? If you
remove had from valve you must calibrate it anyway.
THX for explanation regarding calib start direction
Benefit - what I am looking for:
a) one would like to see, wether position ater valve install is about
the same like last time. So we can be sure everything is fine.
b) right now I always look at MOTOR_PosMax to see wether the number of
pulses are about the same (the gap so far always was < 10 pulses, this
is about 2% from 0x200 to 0x2d0 pulses on my valves.
c) one thing could be to set calibration data manually
controller.c 312 uint8_t v0 = valveHistory[0];
why dont we use old_result here ?
my changes did well over the night ...also revert ... see LAST PART of
log: Vmin=36
PS: I set blocking to 3 to get faster results during testing phase.
credit_expiration=FF
PPS: Maybe we could give credit on each P Move instead of just if credit
is expired ...
Jiri, did you or others ever think about or try replacing the thick
wires of the temp sensor by very thin ones to get faster temp respons
???
BTW: I am blocking integrator now after any move of valve
hu hu ... any anwsers to my last posts would be very welcome ...
the attached jpg shows R354, reverting deactivated and integrator
blocked after any move of valve... as one could see in small rooms
(16m²) with outside temps >10°C our actual 1% valve step is too big for
me...
Heating was deactivatetd in the afternoon, because of sun ..
blocking I: controller.c 396
1
2
}
3
if((uint8_t)pi_term16!=old_result){
4
CTL_integratorBlock=DEFINE_INTEGRATOR_BLOCK;//block Integrator on any valve move
1. did you or others ever think about or try replacing the thick
wires of the temp sensor by very thin ones to get faster temp response
???
2. did someone ever try to move valve in smaller steps - is it possible
to count
and stop 0,5% ?
2a what do I have to change to try it ?
3. in the morning I want to boost temp 1-2° as fast as possible. The
actual controller is way to slow to get the childs room warm in the
morning. We need something like:
if the new wanted temp differs by more than e.g. 1°C from the actual
setpoint we have to open/or close the valve with another algorithm and
hand over to the actual controller one some time or if temp is within
0,3°C to the new temp wanted ...
1. Why? You don't need faster response. Frankly spoken, compare to
heating response it is fast enough.
2. motor.c function MOTOR_Goto replace 100->200. But you need check all
valve calculation, because after this same values can be overloaded. You
must also update LCD and COM functions for correct reports.
3. It if exactly reason for P3_Factor. It is "boost" for big temperature
difference.
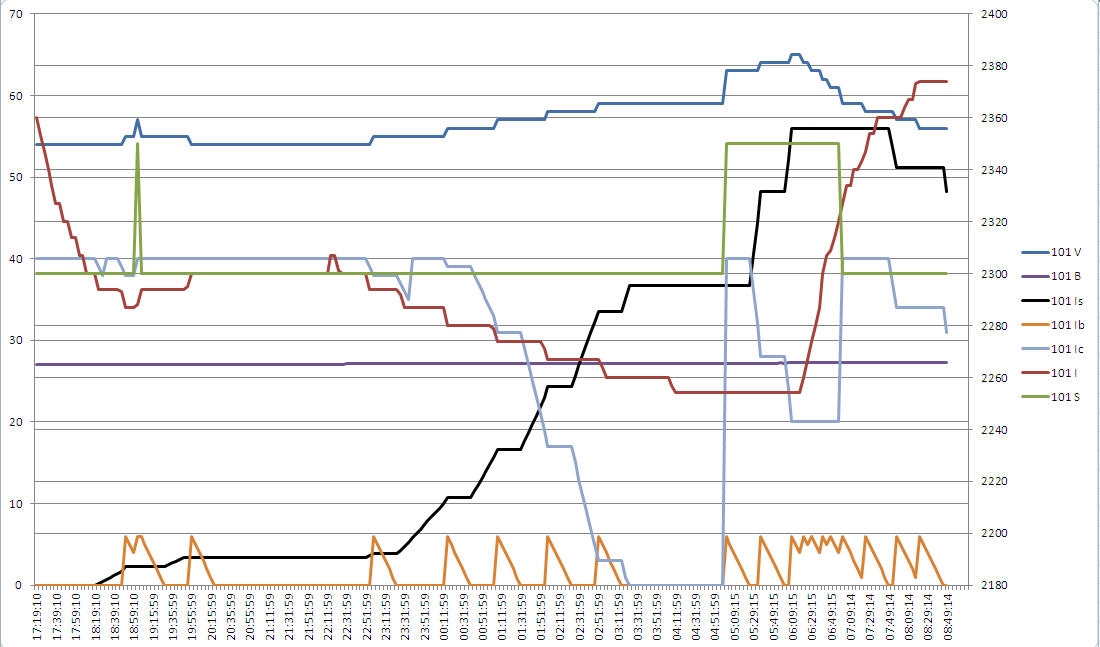
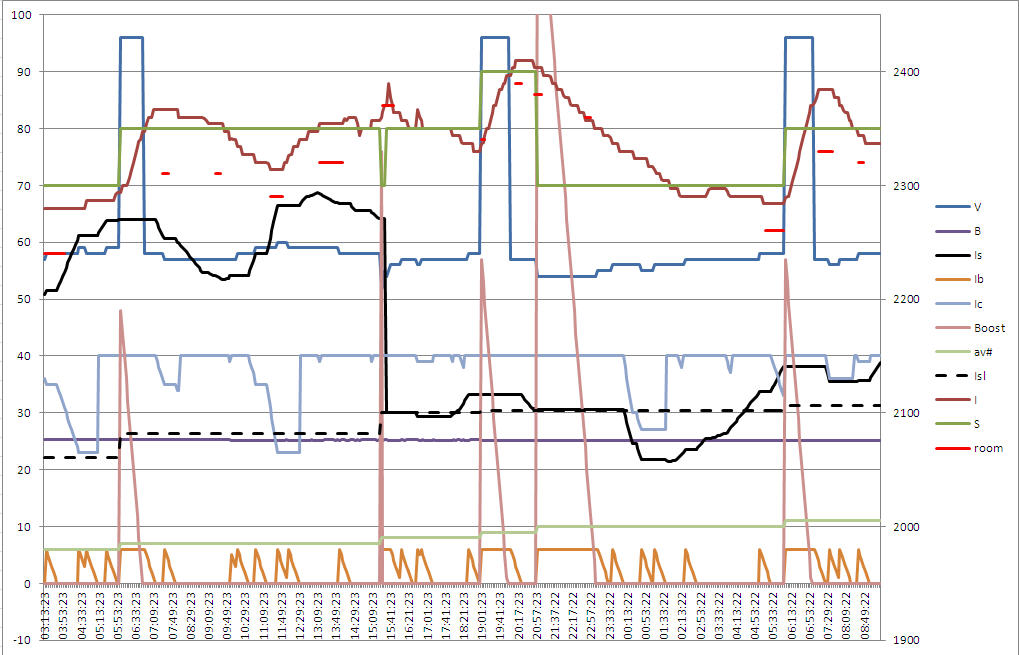
1. As heater heats up valve. the temp sensor is heated up via its wires.
With thin wires, see chart 06:30
hr20_1354_110401a_thin_wire_blocking_I.jpg the impact on sensor is less.
Sensor is still heated up, but just by air. This way we are closer to
real room temp. Newer valves from other manufacturers have smd sensors
with 0,2mm lines...
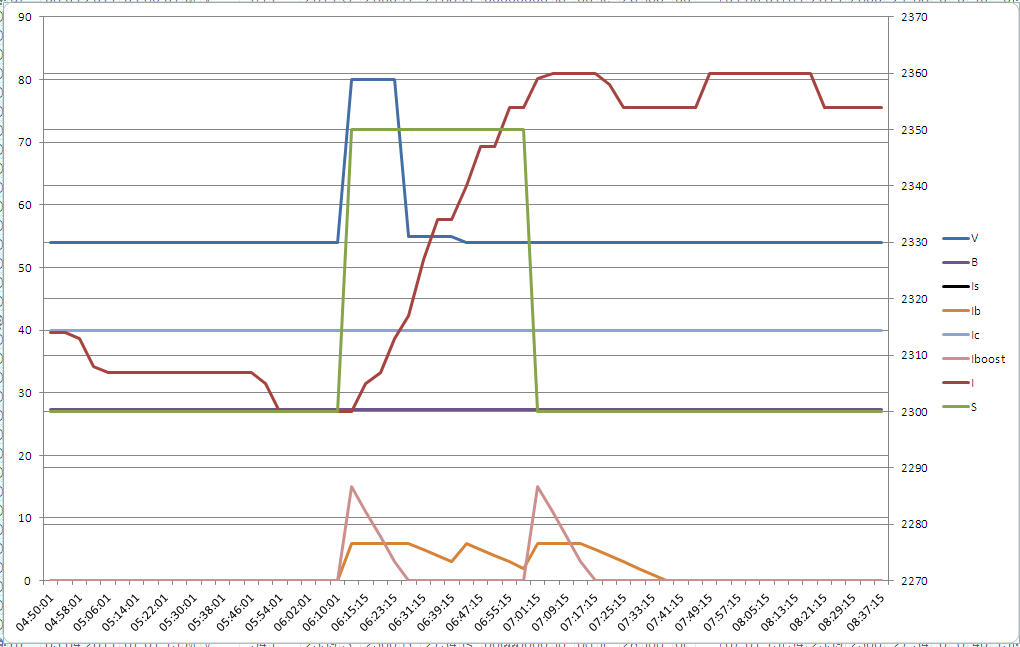
3. I implemented a boost function...quite preliminary still... just
using max and min positions of valve. This is the fastest way to heat up
or cool down... in the next step I will calculate boost_time depending
on error.. see chart 6:10 hr20_2354_110402a_thin_wire_boost.jpg
Description:
if setpoint is changed and gap is larger than setpoint_diff (50=0,5°)
and actual error is large enough (boost_error 30=0,3°) we start boost
funtion. boost sets valve to max or min position depending on error.
boost lasts for boost_time in minutes (15). boost ends earlier if actual
error is less than boost_error - boost_hystereses (30-10=0,2°). During
boost PID controller only calculates errors (no PID values) and
integrator is blocked.
eeprom.h
1
/* */{50,0,0,255},//!< temp_boost_setpoint_diff, unit 0,01°C
2
/* */{10,0,0,255},//!< temp_boost_hystereses, unit 0,01°C
3
/* */{30,0,0,255},//!< temp_boost_error, unit 0,01°C
4
/* */{15,0,0,255},//!< temp_boost_time, minutes
controller.c 150
1
if(minute_ch&&(PID_boost_timeout>0)){//timeout in minutes (15)
2
PID_boost_timeout--;
3
if(PID_boost_timeout==0){
4
PID_force_update=0;
5
}
6
}
if (updateNow) {
1
//jr needed in PID update, so set it later CTL_temp_wanted_last=temp;
2
gotoUPDATE_NOW;// optimize
valveHistory[0]=new_valve;
}
1
CTL_temp_wanted_last=temp;//jr was after line "if (updateNow) {" before
}
COM_print_debug(0);
controller.c ~310:
if (updateNow) {
CTL_interatorCredit=config.I_max_credit;
CTL_creditExpiration=config.I_credit_expiration;
CTL_integratorBlock=DEFINE_INTEGRATOR_BLOCK; // do not allow
update integrator immediately after temp change
testIntegratorRevert(lastAbsError);
lastTempChangeErrorAbs = absErr;
lastTempChangeSumError = sumError;
1
if((PID_boost_timeout==0)&&(abs(setPoint-CTL_temp_wanted_last)>=config.temp_boost_setpoint_diff)// change of wanted temp large enough to start boost (0,5°C)
2
&&(absErr>=(int16_t)config.temp_boost_error)){// error large enough to start boost (0,3°C)
3
PID_boost_timeout=config.temp_boost_time;// temp_boost_time in minutes
@Jiri: still dont look through the ring buffer secrets ... but is it
possible that this
static void shift_ring(void) {
#if ! HW_WINDOW_DETECTION
ring_pos = (ring_pos+1) % AVERAGE_LEN;
should look like that ????
static void shift_ring(void) {
ring_pos = (ring_pos+1) % AVERAGE_LEN;
#if ! HW_WINDOW_DETECTION
average is definitely miscalculated: istead of 9b6 we get ee4
AV is calculated average, followed by the 15 values aof ring buffer
AV0ee4
009b6
109b6
209b6
309bc
409b6
509b6
609b6
709b6
809b6
909b6
A09b6
B09b6
C09b6
D09b6
E09b6
OK so the bugs are = corrected bugs look like:
a) static uint8_t ring_used=0;
b)
static void shift_ring(void) {
ring_pos = (ring_pos+1) % AVERAGE_LEN;
#if ! HW_WINDOW_DETECTION
c)
ring_sum[type]+=(int32_t)value;
ring_sum[type]-=(int32_t)ring_buf[type][ring_pos];
if (ring_used>=AVERAGE_LEN) {
The main reason is that update_ring is called more often than shif_ring
during the phase were ring_used is less than average_len
d) Another question:
switch (++state_ADC) means präfix ++
is this OK then for noise protection:
state_ADC=3;
state_ADC=5;
I found, where was battery measurement problem. Normally it call
update_ring twice (one for battery, one for temperature). And shift_ring
only once after measure finish. But noise cancellation loop can cause,
that measurement repeats many time and next second pulse come earlier.
It restart measures. It repeat update_ring without shift_ring and this
situation with (ring_used<AVERAGE_LEN) create this problem.
Fixed in rev 355, change is here:
http://openhr20.svn.sourceforge.net/viewvc/openhr20/rfmsrc/OpenHR20/adc.c?r1=355&r2=354&pathrev=355
Jiri, THX
d) Another question:
switch (++state_ADC) ..... ++ here means increment before operation !!
is this OK then for noise protection:
state_ADC=3;
state_ADC=5;
I will check the new code tommorow ...
BTW: After 10-15 hours I had this error today .. what is the typical
reason for ir ?
1
if(motor_timer>0){// normal stop on wanted position
(++state_ADC) is correct, next call not execute step 3(5) but 4(6)
Reason for your error is overload maximum volume of pulses during
calibration. (see to MOTOR_MAX_IMPULSES)
"Reason for your error is overload maximum volume of pulses during
calibration. (see to MOTOR_MAX_IMPULSES)"
Can it be another reason, because there was no clalib sceduled after
valve was installed ????
- Maybe it started calib for another reason (not saturday 10:00) - why
would it do that ???
- It might have something to do with the boostfunction. It moves valve
to MAX and later back to MIN ????
R359 THX Jiri:
1.adc I dont understand the -1, because we want to fill all 15
positions(0-14) before we calc average. ring_used runs as ring_pos from
0 to 15 !!!
With -1 we start calculating after 14 (pos=0-13) entries. So pos[14] is
still=0. This way the first calculated average will be wrong ???
if (ring_used>=AVERAGE_LEN-1) { // note for "-1", last measurement can
update ring_average
2.controller line 171 has to be moved after line 200, because
boostdedection needs temp_wanted last see line ~334
valveHistory[0]=new_valve;
line 200 }
1
CTL_temp_wanted_last=temp;//jr was after line "if (updateNow) {" before
}
COM_print_debug(0);
3. See last post. I still dont understand where my E3 can come from. As
I marked the different E3 errors with E31-E34, it must be the one I
posted... Why should it calibrate ? why should this gi wrong then ? Low
Voltage on a long valve move ???
1. It is simple. In this case, we have 15 complete measurement. In table
(0-14), ring_pos=ring_used=14. But ring_used will be incremented later.
It is reason to compare with 14, not 15.
2. Changed in Rev 360
3. calibration is not start after set position to min or max. I start
after valve mount reboot every Sat 10:00 Never else. And see to
condition for this error (MOTOR_calibration_step != 0) it means
calibration on progress or calibration error before this.
New idea for reverting:
Build a moving average of sumerror from max. n(should last for a week or
so...e.g. 255) values. Only use an sumerror for average, if error is
small (<0,3) and stable.
Average is built only after update (typ. 1-4x per day). I need your help
on a simple idea to handle it like the temp_ring_average !!
if (updateNow) {
CTL_interatorCredit=config.I_max_credit;
CTL_creditExpiration=config.I_credit_expiration;
CTL_integratorBlock=DEFINE_INTEGRATOR_BLOCK; // do not allow
update integrator immediately after temp change
testIntegratorRevert(lastAbsError);
Richard:
first - we don't have space for average buffer (used 685 bytes (66.9%
Full) but without unknown stack size on top)
second - something like "stable" error not exist. See here to real data
http://embdev.net/attachment/102842/1.png
third - exist only one correct way. This mean make model function and
use regression analysis to find unknown parameters on real time.
OK,
1. of course I am looking forward to your math model !!
I know that there is no real stable error....
Actually the posted version works without ringbuffer anyway (less
code). But I have to think about a better moving of the average... right
now moving stops after 255 values...
2. in line 308 it was (I_ERR_TOLLERANCE_AROUND_0<<1). This way it only
revert on errors >= 0,3°C ...
3. Jiri why did you solve that with so many #if #else ?? is it less code
? Because this simple change based on 359 was easier to undestand (for
me;-) ...
1
if(updateNow){
2
//jr needed in PID update, so set it later CTL_temp_wanted_last=temp;
3
gotoUPDATE_NOW;// optimize
4
}
5
if((PID_update_timeout==0)){
6
UPDATE_NOW:
7
PID_update_timeout=(config.PID_interval*5);// new PID pooling
2. ???? Where is problem ?
3. I know that it is little bit complicated. But try it and you will see
difference in code size. This code is significantly smaller for
BLOCK_INTEGRATOR_AFTER_VALVE_CHANGE = 0
a) I am curious why you used *2: Does <<1 not work with constants ?
another C thing:
b) When do we declare variables "static" in HR20
c) is an "extern" declared variable automatically "static" ? example is
"lastTempChangeSumError" is static, but as I wanted it beeing sent over
COM I had to declare it extern ...
a) *2 is better for reading. Because is is constant, it is not need
optimize it for execution.
b) "static" is for local only variables and function. "static" function
have one more benefit, it can be linked into call point and it is nice
for compiler optimization.
c) if you need use variable or function outside "C" file it can't be
static.
}
#endif
Jiri,
a) I think line 172 (CTL_temp_wanted_last=temp;) can be at the end
=line189 in both cases... (I checked that already)
b) so we can also forget the #if from 187
c) and the if in 188 is not needed. It does not matter if
CTL_temp_wanted_last is set under any condition more often...
OK I clean up this code.
note: price of moving "CTL_temp_wanted_last=temp;" line is 8 bytes. We
has code bigger than flash already. Current code uses MANY hack to
optimization.
Jiri, I had this E31 error again - please comment on this
When I mounted the valve it was nearly fully open (12 pulses) .. when
the error came up it was fully closed (i nearly could not move it any
further by hand)
Values when E31 came up:
MOTOR_PosMax=12
MOTOR_PosAct=fde9
MOTOR_PosOvershoot=1
MOTOR_counter=23b
The next time calib was OK:
MOTOR_PosMax=2c6
I think we could save some bytes, because with I_ERR_TOLLERANCE_AROUND_0
we have covered this good enough ...
if ((error16 >= 0) ? (old_result < config.valve_max) : (old_result >
config.valve_min)) {
((absErr==lastAbsError) && (absErr<=I_ERR_TOLLERANCE_AROUND_0)))
{ //abserror around 0
and please set the error variables to an invalid value and they have to
be different
please comment on my E31 from above
the post timed out... and please set the error variables to an invalid
value and they have to be different:
static uint16_t lastAbsError = 0xFF; //set invalid
static uint16_t last2AbsError= 0xFE; //set invalid and different to
lastAbsError
if (motor_timer>0) { // normal stop on wanted position
2
if (MOTOR_calibration_step != 0) {
3
MOTOR_calibration_step = -1; // calibration error
4
CTL_error |= CTL_ERR_MOTOR;
5
}
Strange. MOTOR_PosMax-MOTOR_PosAct = 552[dec]
But mininum posion for this error is (MOTOR_PosMax-MOTOR_MAX_IMPULSES)
= -982 = 0xFC2A And this position was not reach.
Motor stops in 2 conditions:
- reach to final positon (not happen)
- motor slow down or stop mechanicaly, but in this condition is
motor_timer==0
This mean, that it can't be this error, or we have some bug in code.
what was in motor_diag (trace variable 0x05)
if (motor_timer>0) { // normal stop on wanted position
if (MOTOR_calibration_step != 0) {
MOTOR_calibration_step = -1; // calibration error
CTL_error |= CTL_ERR_MOTOR;
CTL_error_jr = 1; //jr CTL_ERR_MOTOR;
menu.c ...E35 is spare
1
}elseif(CTL_error&CTL_ERR_MOTOR){
2
if(CTL_error_jr==1){
3
LCD_PrintStringID(LCD_STRING_E31,LCD_MODE_ON);
4
}elseif(CTL_error_jr==2){
5
LCD_PrintStringID(LCD_STRING_E32,LCD_MODE_ON);
6
}elseif(CTL_error_jr==3){
7
LCD_PrintStringID(LCD_STRING_E33,LCD_MODE_ON);
8
}elseif(CTL_error_jr==4){
9
LCD_PrintStringID(LCD_STRING_E34,LCD_MODE_ON);
10
}elseif(CTL_error_jr==5){
11
LCD_PrintStringID(LCD_STRING_E35,LCD_MODE_ON);
12
}
13
}elseif(CTL_error&CTL_ERR_BATT_WARNING){
LCD.c... in any language
{32,14, 3, 1}, //!< " E31" LCD_STRING_E31
{32,14, 3, 2}, //!< " E32" LCD_STRING_E32
{32,14, 3, 3}, //!< " E33" LCD_STRING_E33
{32,14, 3, 4}, //!< " E34" LCD_STRING_E34
{32,14, 3, 5}, //!< " E35" LCD_STRING_E35
{32,14, 4,32}, //!< " E4 " LCD_STRING_E4
it is this code position for sure 99,99% ... I used the motor diag watch
for something else ;-)
it seems like it happens only after I flashed a new programm and had the
batteries out ... can this be a trace ??
I have 4 different error messsages for the 4 different code lines of E3
(E31-E34 see last posts)
E31:
if (motor_timer>0) { // normal stop on wanted position
if (MOTOR_calibration_step != 0) {
MOTOR_calibration_step = -1; // calibration error
CTL_error |= CTL_ERR_MOTOR;
1. I think we could save some bytes, because with
I_ERR_TOLLERANCE_AROUND_0
we have covered the sign change as well ... delete highlighted line
if ((error16 >= 0) ? (old_result < config.valve_max) : (old_result >
config.valve_min)) {
if (
((absErr==lastAbsError) && (absErr<=I_ERR_TOLLERANCE_AROUND_0))) {
//abserror around 0
2. please initialize the error variables with an invalid
value and they have to be different:
1
staticuint16_tlastAbsError=0xFF;//set invalid
2
staticuint16_tlast2AbsError=0xFE;//set invalid and different to
3
lastAbsError
3. I use a moving average for reverting ... this way the problem of
short periodes (some days, depending on I_SUMERR_CHANGE_WEIGHT ) with no
heating looks quite well ...
if (updateNow) {
CTL_interatorCredit=config.I_max_credit;
CTL_creditExpiration=config.I_credit_expiration;
CTL_integratorBlock=DEFINE_INTEGRATOR_BLOCK; // do not allow
update integrator immediately after temp change
testIntegratorRevert(lastAbsError);
if ((lastAbsError==last2AbsError) &&
(lastAbsError<(I_ERR_TOLLERANCE_AROUND_0*2))) {//stable error & error <
0,3°C)
//imapct of SumErr changes on lastSummError, averaging for integrator revert
}
lastTempChangeErrorAbs = absErr;
// lastTempChangeSumError = sumError;
#define I_SUMERR_CHANGE_WEIGHT 10 // impact on lastSumError which is
used for reverting
1) I thing that it is not covered, this is reason :
(absErr==last2AbsError). See here
http://embdev.net/attachment/102842/1.png
Except this I thing that zero cross is better than something
with(absErr==last2AbsError)
2) You are right, it is best practice. But because situation in flash
space is critical, I will use it only if it really needed. I thing, that
0 not make any problem.
3) Why? You don't need make any average from stable value. If this value
is not almost stable, something is wrong. We need solve causation, not
mask result.
ad1) (absErr==last2AbsError) this prevents, that we give credit, if
temperature rushes up/down = ext. influence. In your example I guess it
was P part and not integrator moving the valve. So a fast change of sign
should not be handled by I-part and a slow change is covered by
"dedection around 0"... I live quite well for a while without the sign
dedection, but loosened the restriction (absErr==last2AbsError) to
(absErr==lastAbsError)...
ad2) well, directly after boot, temp is updated and comparisons like
this go wrong then.. but I can live with that ... your decison...
if ((lastAbsError==last2AbsError) &&
(lastAbsError<(I_ERR_TOLLERANCE_AROUND_0*2))) {//stable error & error <
0,3°C)
// && (average_sumerr_count<255) ) {
ad3) Because right now - in times where heating is deactivated temporary
by high outside temps during day or night ... the actual code
lastTempChangeSumError = sumError;
produces more wrong reactions (I-parts) than a continous averaging:
lastTempChangeSumError +=
(sumError-lastTempChangeSumError)/I_SUMERR_CHANGE_WEIGHT; // weight
e.g.=10
I thik this is a compromise (with liitle code) until we find a better
(math) solution for revert
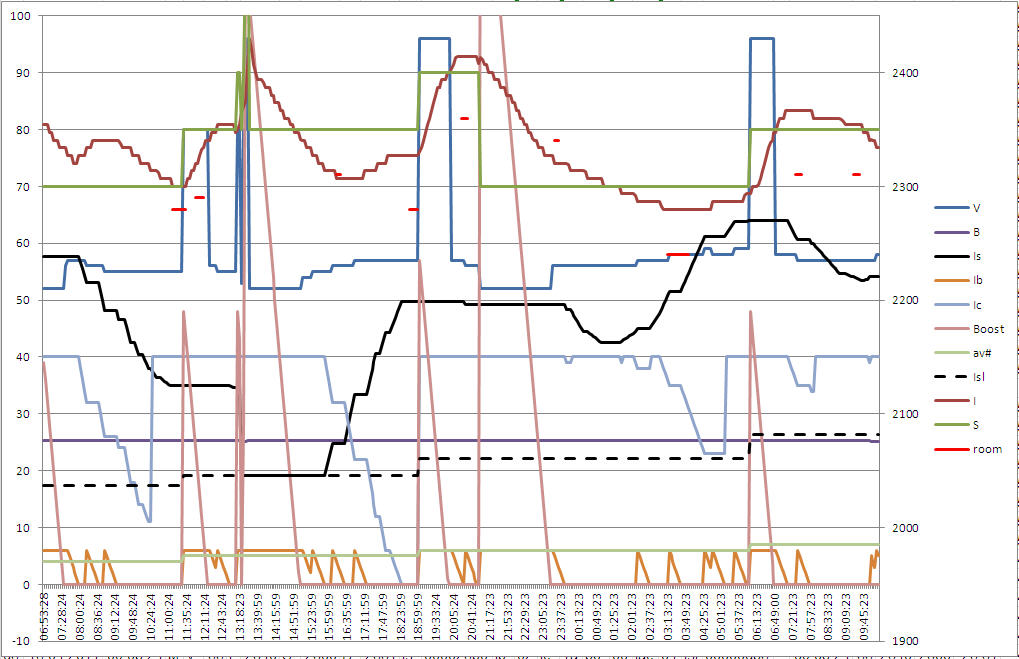
here is a quick status from my side which includes:
NO_AUTORETURN_FROM_ALT_MENUES=-DNO_AUTORETURN_FROM_ALT_MENUES=1
BLOCK_INTEGRATOR_AFTER_VALVE_CHANGE=-DBLOCK_INTEGRATOR_AFTER_VALVE_CHANG
E=1
BOOST_CONTROLER_AFTER_CHANGE=-DBOOST_CONTROLER_AFTER_CHANGE=1
and a modified code for reverting (posted above, value Isl in the chart)
Valve MAX=80, MIN=CENTER=52, Credit_expiration=255
I changed MAX to 96 around 13:00, 80% did not open the valve wide
enough. This way boost function works more effective.. room gets warmer
about 0,7° within 1 hour ... during this valve reverted SumError=Is
(vlack line) to lastSumError=Isl (moving average with 10% impact of
SumError ... see black dotted line)
Heating was OFF from 22:00-4:30..
@Jiri:
I found some bugs in my code (BOOST) and deleted unnecessary EEprom
variables ...
Could you please integrate the changes from OpenHR20_R363_mod110417.zip
in a new revision ... THX
thisprevents,thatwegivecredit,iftemperaturerushesup/down=ext.influence.InyourpostedexampleIguessitwasPpartandnotintegratormovingthevalve.SoafastchangeofsignshouldnotbehandledbyI-partandaslowchangeiscoveredby"dedection around 0"...Ilivequitewellforawhilewithoutthesign
61
dedection
62
if(// ((lastErrorSign != ((uint8_t)(error16>>8)&0x80))) || //sign of last error16 != sign of current
63
((absErr==last2AbsError)&&(absErr<=I_ERR_TOLLERANCE_AROUND_0))){//abserror around 0 with slow change
Hi Jiri - are you still there ? - I would like to finish up, before the
summer comes and I forget everything .... ;-)
RE: "Can you generate "diff" file? (for ex in TortoiseSVN)"
Sorry, no know how in those things ...
a) either you instruct me or
b) I could also edit the changes into R363 files and send you those ..
Need some help. I receive following error msg during compiling:
**** Build of configuration Debug for project HR20 ****
make all
Building file: ../src/lcd.c
Invoking: AVR Compiler
avr-gcc -Wall -g2 -gstabs -O0 -fpack-struct -fshort-enums -std=gnu99
-funsigned-char -funsigned-bitfields -mmcu=atmega169p -DF_CPU=1000000UL
-MMD -MP -MF"src/lcd.d" -MT"src/lcd.d" -c -o "src/lcd.o" "../src/lcd.c"
../src/lcd.c: In function 'LCD_HourBarBitmap':
../src/lcd.c:627: error: r28 cannot be used in asm here
../src/lcd.c:627: error: r29 cannot be used in asm here
make: *** [src/lcd.o] Error 1
**** Build Finished ****
lcd.c revison: 192
how can i fix this error(s)?
I've also tried to compile it with AVR-Studio 5 => same compiler
error(s):
Error 1 r28 cannot be used in asm here ...\lcd.c 627 1 OpenHR20
Error 2 r29 cannot be used in asm here ...\lcd.c 627 1 OpenHR20
Error:
../src/lcd.c:627: error: r28 cannot be used in asm here
../src/lcd.c:627: error: r29 cannot be used in asm here
Fix-Proposal:
modify line in lcd.c
from:
: "r14", "r15", "r16", "r28","r29", "r30", "r31"
to:
: "r14", "r15", "r16", "r30", "r31"
after this modification the compilaton will pass.
What are the side-effects of this fix?
(I'm not so experienced with assembler coding ...)
Problem is that this line not create any code. It just inform compiler
optimizer about used registers. If you remove it, ASM code rewrite this
registers and compiler will not know it. It will fail.
Are you sure that in compilation you use WinAVR-20100110 ? It is tested
with this without problem.
Hello again,
I've tried to compile it with "release" setup, and it is
compiling.(Before, it was in the "debug" setup => with this setup i got
the above mentioned errors.)
are the compiling options wrong?
release-setup:
avr-gcc -Wall -Os ...
debug-setup:
avr-gcc -Wall -g2 -gstabs -O0 ...
After some further testing....
The parameter/option "-O0" raise this errors. When i am select one of
the other optimization levels "-O1..3" the errors are not occured.
Can someone explain me this crazy behavior?
sounds plausible. ;-)
What will be the workaround/fix (is it a bug?)
Why this error was only reported/seen by me (i think the compilers with
same options should report same errors...)?
jdobry wrote:> I am still here. But I am too busy on another tasks till end of may.
Hi Jiri, hope you have/had a good summer ... can we continue to
integrate the changes from post http://embdev.net/topic/118781#2153401
BR Richard
@ Richard G.:
I review this changes, and it is not possible use as is. It contain many
other changes that only core. It is not encapsulated into ifdef. And I
has not time to rewrite it.
Please send me it as "patch", or I must say sorry for this moment. I
have some urgent concern to solve.
Jiri
Hi!
I flashed 7 rondostates with the firmware of 29.8.2011. It seems to me
that the vent does not open, even if the room is too cold.
Example: Temperature is 18,7, wantet temperature is 20, Vent is about
55-60%. (max vent position 96, min position 30).
Maybe I have to set min position to a higher value, because the vent
closes at about 45%?
Chris
Hi,
I plan to buy RFM12(x) modules to use with HR20E. What are the correct
types to use?
Currently I prefer:
RFM12 for MASTER (because it is specified for 5V)
RFM12B for all (Rondostat-) slaves (because it is specified for 3,3V).
What frequency should be used: 433MHz vs. 868MHz?
What types are supported by current existing SW? (I didn't find any
switch in source code to choose B-Type or 433/868MHz)
Thank you for some useful suggestions.
-Holger
I want use some HR20 as central control. Temperatures are measured
externally. To to this i have extended the firmware:
1. Improved input operation in com.c
2. Serial Bus mode Ixx enables the communication with ID=xx all other
devices are silent.
3. Override measured themperature via Oxxxx
4. Debug prints free RAM
With 2. i have an problem. Variable 0x27 holds the bus id but i cannot
change this. 0x27 is allays set to 0xff
By the way:
5. i can communicate only with 1200 baud when i set COM_BAUD_RATE to
1140 on higher speed i receive no correct characters.
6. the hr20 prints 22.6°C while an DS1820 messures 24.87°C
7. i have changed the boot loader to fastboot. With lboot i can flash
with 115200 baud
@Holger T.: I use 868MHz modules. RFM12B is improved version of RFM12. I
recomend new.
@Frank: Thanks for patch I will try it later.
add 5) see to http://atmel.com/dyn/resources/prod_documents/doc2555.pdf
add 6) HR20 use only cheap thermistor. But you can calibrate it in
EEPROM
add 7) I don't use bootloader. Reason is some temporary problems with
flash space and in this case, every byte is needed.
I have written an r/c clock calibration code. I uses no timers other
than rtc and no interrupts. I thin this code is good enough to call it
periodically to avoid communication problems while voltage or
temperature is changing.
Jiri, you remember I also had calibration errors last year.... again
this year on different valve..
It is the error from the else part (my ident CTL_error_jr = 2)
MOTOR_PosMax 47, MOTOR_PosAct 47, MOTOR_PosOvershoot 2,
MOTOR_counter 5E6, motor_diag 779
How it happens:
1 I pressed a button and got E2 (valve not mounted, maybe I pressed to
hard ;-)
2 I took valve off
3 I set the heater valve head manually near full open
4 put valve back on
5 valve starts adapting and stops with the error on full open position
I took it off again and repeated from 3. Same error again ...
Then I took battery out and repeated from 3. No more error !
Hi Jiri,
I too experienced a E3 error and could not find any reason for it, but
it could be because I used empty batteries.
With current version, I have 2 main problems:
1: The window open function still triggers randomly, for example if the
central heating goes out for a few minutes and there is a slight drop in
temperature. I tried different eeprom settings to disable the window
open detection, but it still triggers.
2: With default settings, valve is always around 50%. Our water
temperature is only high enough to reach wanted temperatures, but only
if vents are at about 90%. So I increased the value for valve-center.
Problem is that valve is opend or closed with a too flat curve. For
example, when wanted temperature is 20 and real temperature is 21, valve
only closes a little bit, which is not enough.
I think I have to change impact of P-Part of the controller?
Chris
Hi all,
I've been reading this, and the other German thread (through google
translate), along with the documents referenced in those, but still have
some questions.
I currently have one HR20 and one HomExpert HR20Style. As soon as I get
everything working I will purchase 7 more HR20Style (since they're
cheaper than the original HR20.)
My goal is to power and control the thermostats over wiring already
present for this purpose.
What I need to do is to set the desired temperature, and read the actual
temperature. Reading the valve state would be a plus.
I now have the HR20 hooked up (it's SW 204), and can read the
information it sends me (fe.: "K: 0b1 [0x0D][0x0A]>")
I cannot successfully send it any commands, I always get the message
"Error in command[0x0D][0x0A]>"
After a while any commands I send it are ignored. (I assume the device
has gone to sleep.) I have not found a way to wake it up.
Apparently all this is because the information I'm using concerns the
protocol of an earlier hardware version (with a NEC chip instead of the
Atmel AVR mine has?)
I have not found a protocol specification for the SW 204 specifically.
Is it possible to control the SW 204 in the same way as the earlier
edition? If so, could someone point me to the correct protocol
specification?
If not, then I assume I will need to flash the HR20 with OpenHR20? I
have a ICSP programmer, but as I understand it I cannot use this unless
I actually open up the HR20 and solder some extra wires to it?
So I've ordered a cheap AVR JTAG ICE from ebay (I figure I'll be able to
use it later for other purposes anyway, even if I don't need it after
all.)
If I'm correct so far, these would be the steps required to flash the
HR20?
* I will not be able to connect the JTAG connector directly to the HR20
and will need to make some wires to connect the right pins to the JTAG
connector.
* I will then use avrdude (I do not have any Windows) to upload the file
hr20.bin to the HR20 using the AVR JTAG ICE.
* Afterwards, I can use the OpenHR20 protocol to accomplish my goal.
I've checked out the svn repo, and have also downloaded the v1.0
zipfile.
I see no .bin files inside the svn repo.
Is the zipfile's original_sww/hr20.bin the file I need, or would you
recommend (considering my goal) to compile one from the latest svn
source instead?
If I need to compile a bin file, could you tell me how to do this? My C
knowledge is very limited, so the correct avr-gcc (if that is the
correct application?) command line would be very helpful.
All the thanks,
Bernard Kerckenaere
Bernard K:
- serial protocol for original SW 204 is unknown.
- I don't known if HR20 style contain same HW as HR20. Please check it
ane tell us results.
- You are right ICSP can't be used without open valve and soldering.
- connector on HR20 have't same layout like AVR JTAG, you will need
special cable.
- I am not using Windows too. You need "avr-gcc" package. On actual
source directory simple start "make". I recommend do it in "rfmsrc"
directory and result hex files will be on "bin"
- Here is TESTED avrdude commands. You will probably need both in same
order. Without first is impossible rewrite EEPROM.
@Jiri, @Bernard
I have flashd without soldering. All ISP pins are on the connector and
under the tree keys. The display can be easy removed from battery side.
With fastboot
http://www.mikrocontroller.net/articles/AVR_Bootloader_FastBoot_von_Peter_Dannegger
the new firmware can be flashd via serial cable.
This is my modified Makefile:
1
---Makefile.orig2011-09-2910:50:21.000000000+0200
2
+++Makefile2011-09-2911:02:07.015224003+0200
3
@@-37,7+37,7@@
4
# MCU = attiny85
5
# MCU = atmega2560
6
# MCU = atmega1281
7
-MCU=atmega8
8
+MCU=atmega169p
9
10
# Name of the Atmel defs file for the actual MCU.
11
#
12
@@-50,16+50,16@@
13
# files" and unzip it in the same directory as this Makefile.
14
#
15
# Examples (select one of them or add your own):
16
-#ATMEL_INC=m168def.inc
17
+ATMEL_INC=m169def.inc
18
# ATMEL_INC=m64def.inc
19
# ATMEL_INC=tn85def.inc
20
# ATMEL_INC = m2560def.inc
21
# ATMEL_INC = m1281def.inc
22
-ATMEL_INC=m8def.inc
23
+#ATMEL_INC=m8def.inc
24
25
# Processor frequency. The value is not critical:
26
#F_CPU = 14745600
27
-F_CPU=8000000
28
+F_CPU=4000000
29
30
# AVR Studio 4.10 requires dwarf-2.
31
# gdb runs better with stabs
32
@@-68,11+68,11@@
33
34
# Define the Tx and Rx lines here. Set both groups to the same for
35
# one wire mode:
36
-STX_PORT=PORTD
37
-STX=PD1
38
+STX_PORT=PORTE
39
+STX=PE1
40
41
-SRX_PORT=PORTD
42
-SRX=PD0
43
+SRX_PORT=PORTE
44
+SRX=PE0
45
46
####### End user presets ######################
This is my avrdude call. You need the EEPROM image from OpenHR20
Thank you very much for all the information, I really appreciate it!
I'll wait for my JTAG programmer to arrive (it's on its way, and looks
to be a bit easier to use than ISP), and will then try and verify
whether I can flash and get the sought after results on both the HR20
and the HR20Style.
Again thank you!
Jiri: I thought it might be a good idea to just include the files with
major changes. Otherwise you will also get beautifiing stuff ... do you
want them all ?
Hi!
Did anybody consider adding 1-wire connectivity yet?
(Axel_5 mentioned something in other threads but no details.)
This could use the one free pin in the connector (PE2 I think). No need
for Hardware adaptions.
The device could mimic multiple "standard" 1-wire devices:
- a temperature sensor (RTC value)
- ADC (valve target position)
- EEPROM (non-volatile config)
- RAM (current state)
perhaps even:
- switch/PIO (for buttons) but this would possibly be missed when
polling is intentionally slow.
User interface would need the possibility to configure the address.
I'm thinking of semi-autonomous operation - current target mode and
timetable are uploaded regularly, temperature values are centrally
logged.
Full "slave mode", just using the temperature sensor, the valve actor
and the wheel and buttons for user requests and doing the rest centrally
would also be possible.
I plan to implement this, but would like to hear your thoughts.
I got the first HR20-E flashed with JTAG last night. I'm very impressed.
So thanks. Now, my question, assuming this is the right forum for
this...
I also got an HR-25
(http://www.homexpertbyhoneywell.com/en-DE/Products/rondostat/Pages/HR-25.aspx)
which has a very, very similar PCB to the HR-20. It has a MEGA329P on
board and a fancier LCD and only a couple of extra tracks/vias that I
can spot. I'm tempted to get more of these instead for the nicer LCD and
bigger code space.
Before I go reinventing wheels, has the OpenHR20 code been ported to
this, the LCD mapped out etc.? i.e. has anyone done work already on
supporting the HR25?
>Did anybody consider adding 1-wire connectivity yet?
I can upload my code tonight.
However I have forked this a long time ago, so maybe it is quite
difficult to merge this in the current branch.
Basically the temperature can be read as a simple 1-wire temperature
sensor, target temperature can be set. The value of the valve can also
be read.
However power consumption is quite high as I have removed all sleep
modes as the device is always powered through the cable. Also the
timetable is removed as this is now done by the central controller.
Best regards
Axel
@Axel Laufenberg:
If you want store your code into repository please contact me on
jdobry-at-centrum-dot-cz and send me your account name from sourceforge.
Is it based on trunk(I will not make improvements) or rfmsrc
(recomended)?
If it is encapsulated to "ifdef" preprocessor you can add this into
current code. Otherwise please create new branch in repository.
Sorry, I do not have time right now to add to the repository, I just
spent some time to translate most of the stuff into English. And I
recognized that I used a version from 2008, so I guess this does not
have too much in common with the current version.
Actually only the attached files are affected. The main.c only gets the
additional function to assign the values received and transmitted
from/to the onewire interface and gets the sleep mode disabled.
motor.c is changed because the external interrupt is used. This now has
to handle also the 1-wire edge handling. The file onewire.c handles the
timing for the onewire. I just recognised that the ISR is in the code
twice, once within the motor.c and once in the onewire.c. Actually it is
only used in motor.c as otherwise the interrupt routine may be too slow.
Actually you should be aware that the AVR needs to be clocked at 8 Mhz,
otherwise it is too slow to handle the onewire timing.
I tried to document as good as possible, so it should be no problem to
add this to the code.
If I find the time I can try to make this all a bit nicer and merge it
with the repository, but ....
So I hope this is in any case helpful to somebody, if you have questions
please feel free to ask.
Axel
@Axel:
Wow, thanks a lot - mostly what I hoped for. It's a pity that it will
need to run on 8MHz.
The code looks good and well documented too (and I have no problem with
the german parts ;-) ).
@Axel&Jiri:
When I have this running (which still might take me a few weeks), I'll
try to integrate it with the current version and into the repository.
Maybe I can even invest some of the effort saved into thinking a bit
more about the 1-wire-bootloader :-).
Rupert
I have got the LCD working on the HR25. It seems to work fine. I'll have
to wait until the RFM12s arrive before testing further. See
https://sites.google.com/site/slangey/misc/honeywell-hr25 for some more
details including pictures of the board.
I've done the changes against rfmsrc and it touches the Makefile,
lcd.c/.h and rs232_485.c/.h. I would appreciate if someone could please
review and give comments before (hopefully) getting this in to svn?
Bruce.
Bruce_a:
I made fast review and looks OK. Committed into revision 364.
PS: I made only small fix (compilation need remove one space in
rfmsrc/OpenHR20/Makefile) and modify rfmsrc/Makefile to create new
target platform files.
It looks that it can support hardware window detection and RFM without
any additional changes. But I am not create target files for this
because I can't test it.
Is there any technical difference between HR20 and HR25 than CPU and
display? There is at least little space left in the 169 flash so it
might make sense to replace the CPU and take the HR25 SW-version.
Cheers,
Knut
Hi Knut,
It would appear just to be a CPU/LCD difference. Amtel's migration docs
suggest not much interesting has changed. The code would need just one
more target to specify the new cpu correctly. Be aware that the cheap
JTAG programmer I got off ebay doesn't program the 329 :( (see the link
in previous post). So I'm thinking RFM12b & serial bootloader... and/or
replacing the JTAG pins on the side with ISP ones.
Hi All,
I've been watching this thread for a while now, and have taken the
plunge and purchased an HR20.
Could someone advise what is the best lowcost JTAG programmer to get
started with for the HR20.
Cheers
Stuart
I haven't received mine yet, but according to the documentation it's
CP2102-based, not FT232.
That said, CP2102 support is part of the usb-serial driver nowadays, so
I don't foresee any problems there.
Jiri Dobry:
I keep getting these messages:
avrdude: Device signature = 0xffffff
avrdude: Yikes! Invalid device signature.
Double check connections and try again, or use -F to override
this check.
And when I try it with -F, I get this after setting the fuse:
avrdude: jtagmkI_initialize(): warning: OCDEN fuse not programmed,
single-byte EEPROM updates not possible
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100%
0.04s
avrdude: Device signature = 0xffffff
avrdude: Yikes! Invalid device signature.
avrdude: Expected signature for ATMEGA169 is 1E 94 05
avrdude: reading input file "0x99"
avrdude: writing hfuse (1 bytes):
Writing | ################################################## | 100%
0.01s
avrdude: 1 bytes of hfuse written
avrdude: verifying hfuse memory against 0x99:
avrdude: load data hfuse data from input file 0x99:
avrdude: input file 0x99 contains 1 bytes
avrdude: reading on-chip hfuse data:
Reading | | 0%
0.00savrdude: jtagmkI_read_byte(): timeout/error communicating with
programmer (resp )
and this after flashing:
avrdude: jtagmkI_initialize(): warning: OCDEN fuse not programmed,
single-byte EEPROM updates not possible
avrdude: AVR device initialized and ready to accept instructions
Reading | ################################################## | 100%
0.04s
avrdude: Device signature = 0xffffff
avrdude: Yikes! Invalid device signature.
avrdude: Expected signature for ATMEGA169 is 1E 94 05
avrdude: erasing chip
avrdude: jtagmkI_initialize(): warning: OCDEN fuse not programmed,
single-byte EEPROM updates not possible
avrdude: reading input file "hr20.hex"
avrdude: input file hr20.hex auto detected as Intel Hex
avrdude: writing flash (12842 bytes):
Writing | ################################################## | 100%
2.93s
avrdude: 12842 bytes of flash written
avrdude: verifying flash memory against hr20.hex:
avrdude: load data flash data from input file hr20.hex:
avrdude: input file hr20.hex auto detected as Intel Hex
avrdude: input file hr20.hex contains 12842 bytes
avrdude: reading on-chip flash data:
Reading | ################################################## | 100%
3.13s
avrdude: verifying ...
avrdude: verification error, first mismatch at byte 0x0000
0x14 != 0xff
avrdude: verification error; content mismatch
avrdude: safemode: Fuses OK
avrdude done. Thank you.
I've connected the device as follows:
With the debug port on the HR20, seeing it with the controls on top and
the valve connector on the left:
bat [rx] tdo tms rst
gnd tdi [tx] tck [pe2]
I've connected to the jtag device (as seen from the end of the cable
with the thick part on bottom):
gnd - rst bat gnd
tdi - tms tdo tck
I've made sure that the correct wires from the hr20 are going to the
jtag device (using the above for the hr20, and the silkscreen on the
jtag device), and I've checked the cable I made from one end to the
other for both shorts and breaks, and everything seems fine to me.
Have I got some of the connections wrong?
StuartP, this is how my ubuntu 11.10 sees the device:
[161812.004460] usb 5-2: new full speed USB device number 2 using
uhci_hcd
[161812.643212] usbcore: registered new interface driver usbserial
[161812.643229] USB Serial support registered for generic
[161812.643276] usbcore: registered new interface driver
usbserial_generic
[161812.643279] usbserial: USB Serial Driver core
[161812.663934] USB Serial support registered for cp210x
[161812.663975] cp210x 5-2:1.0: cp210x converter detected
[161812.772084] usb 5-2: reset full speed USB device number 2 using
uhci_hcd
[161812.977264] usb 5-2: cp210x converter now attached to ttyUSB0
[161812.977284] usbcore: registered new interface driver cp210x
[161812.977286] cp210x: v0.09:Silicon Labs CP210x RS232 serial adaptor
driver
>> avrdude: Device signature = 0xffffff
This means that you have not connection or JTAG programmer is broken,
AVR chip broken, JTAG is disabled in AVR fuses (it can be done by SPI
programmer)
MOST probably version is that you have some problem on wires.
Your pinuot in text looks fine. You can compare it
openhr20.svn.sourceforge.net/viewvc/openhr20/trunk/doc/steckerbelegung/s
teckerbelegung.jpg
JTAG pinout is here http://mdfly.com/images/Wireless/JTAGlayout.jpg
Are you sure that you not rotate/mirror some connector. I mean swap pin
1-5 5 or 1-2 or rotate some pinout 180deg ?
I just tried crossing TDI and TDO, but I'm getting the same result.
How should they be connected in fact? TDI of HR20 to TDI of JTAG
(according to the pinout in the jpgs Jiri posted), or crossed?
I'm sure everything is correct as it should be, I've measured the cable
through from one end, where it connects to the pins on the programmer,
to the other, where it goes onto the pins of the HR20. The pinouts I've
followed are the same as in the jpegs as well, and match the silkscreen
on my programmer.
And as soon as I connect the cable to the HR20, the second light on the
programmer goes on, where the voltage protector gets its power from the
Batt pin on the HR20, so if that pin is correct, the orientation should
be correct too.
There isn't anything I need to do on the HR20 itself before I can start
using the jtag right? I've put in batteries, and now it's blinking 2005,
and I haven't done anything else to it since.
I'll play with it some more tomorrow morning. If you would have any
other tips on what I could try, I'm all ears. I'm quite new to this, so
I don't have a lot of experience in debugging errors like these.
Thank you for all the help so far!
Ah, one more thing: I've also taken off the valve part, so I could put
batteries inside, and I haven't put that part back on.
I don't know if that makes any difference, but I figure I'd better
mention this as well.
Basically, the programmer and the target shall be a daisy chain
regarding TDO and TDI, but it depends on the description of the
programmer: whether it is its output for or the target's output.
I am using an AVR Dragon with AVR Studio on Win7. The batteries have to
be inserted. When reading and programming, the Dragon resets the HR20,
so it does not matter in which state the HR20 is...
is there anywhere a discription, how to make the hex-file to programm
the hr20? i find in the repository nothing how to do it. i want to
programm the hr20 by SPI, i habe no jtag-programmer, i know that i have
to sold some cables to the pcb, but its ok for me. but i need the
hex-file
thx a lot
Jan
ok, i found something in the rfmsrc/openhr20 folder. do i need any of
these files to make the hex-file? i also found the description in
branches/before_refactoring/doc, this can i use to make the hex-file or?







{kind=link}
{kind=link}
{kind=link}