{kind=link}
{kind=link}
{kind=link}
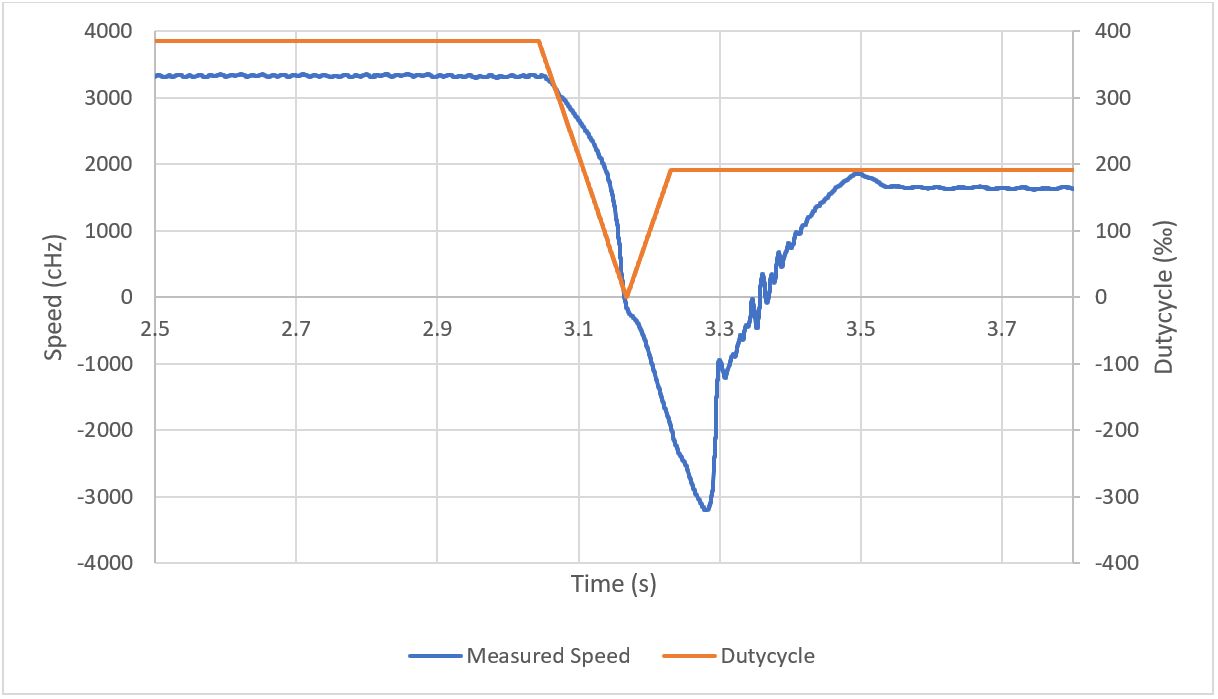
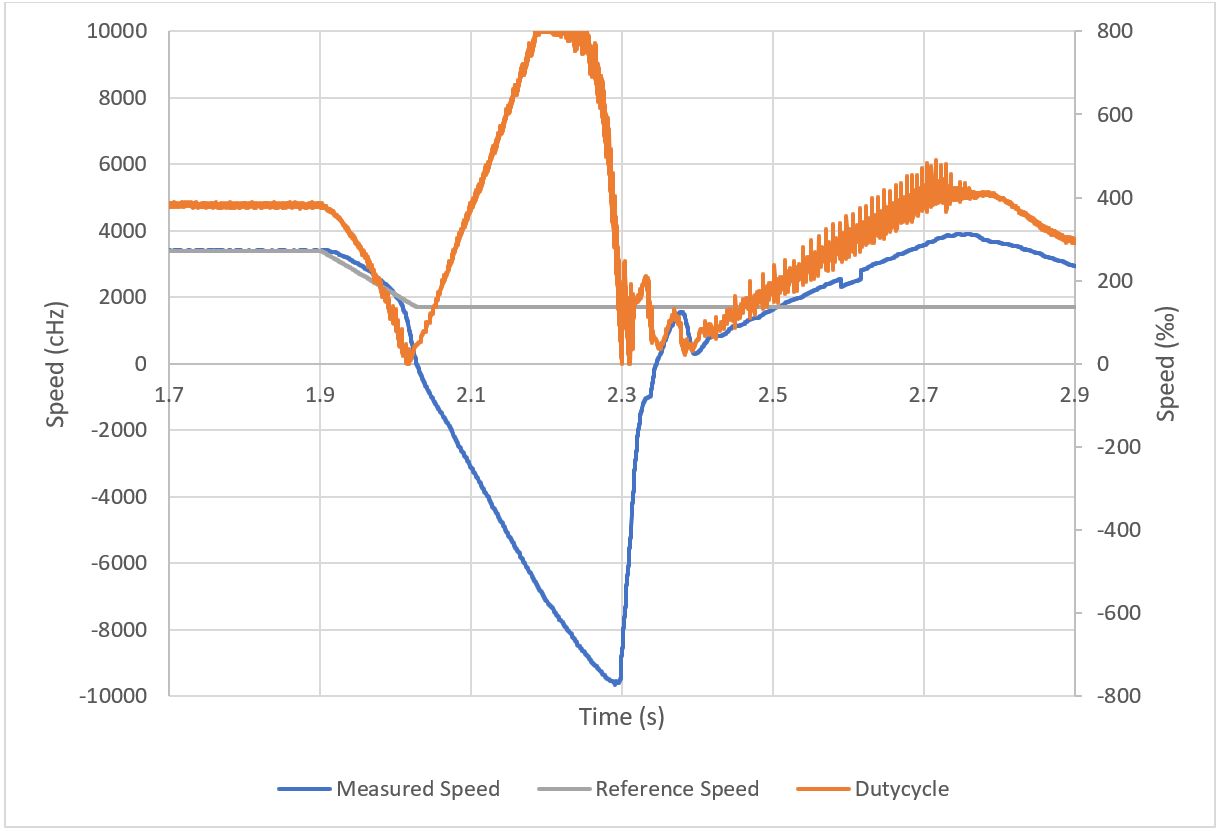
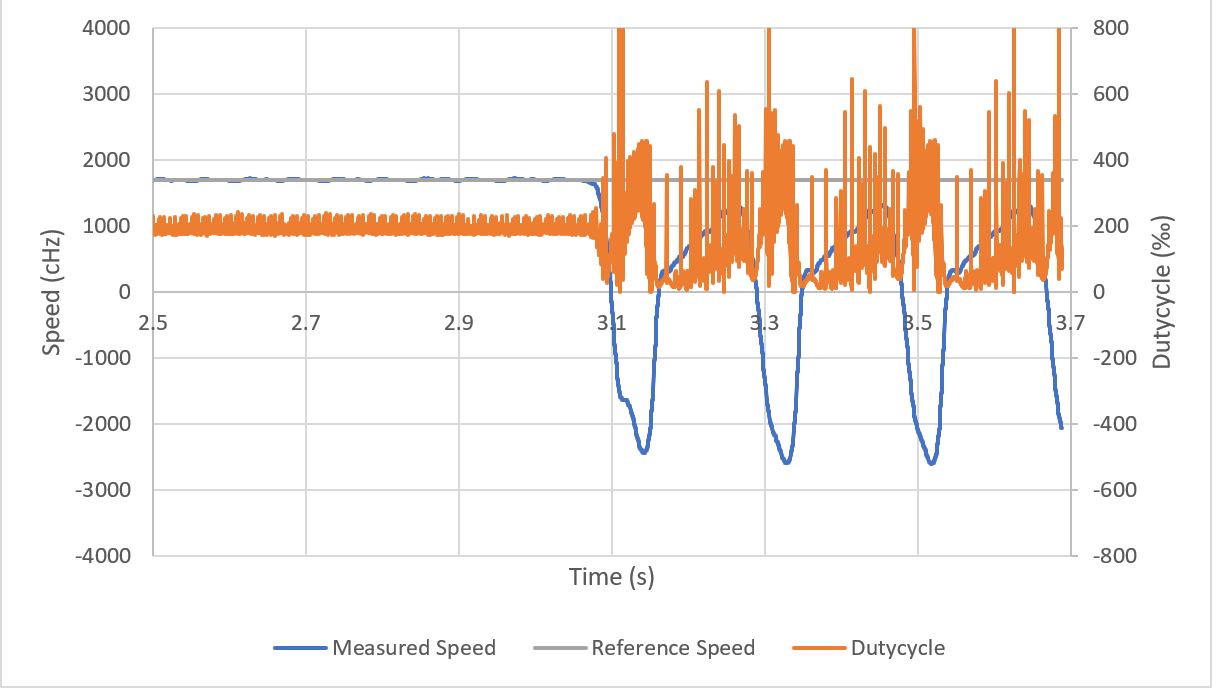
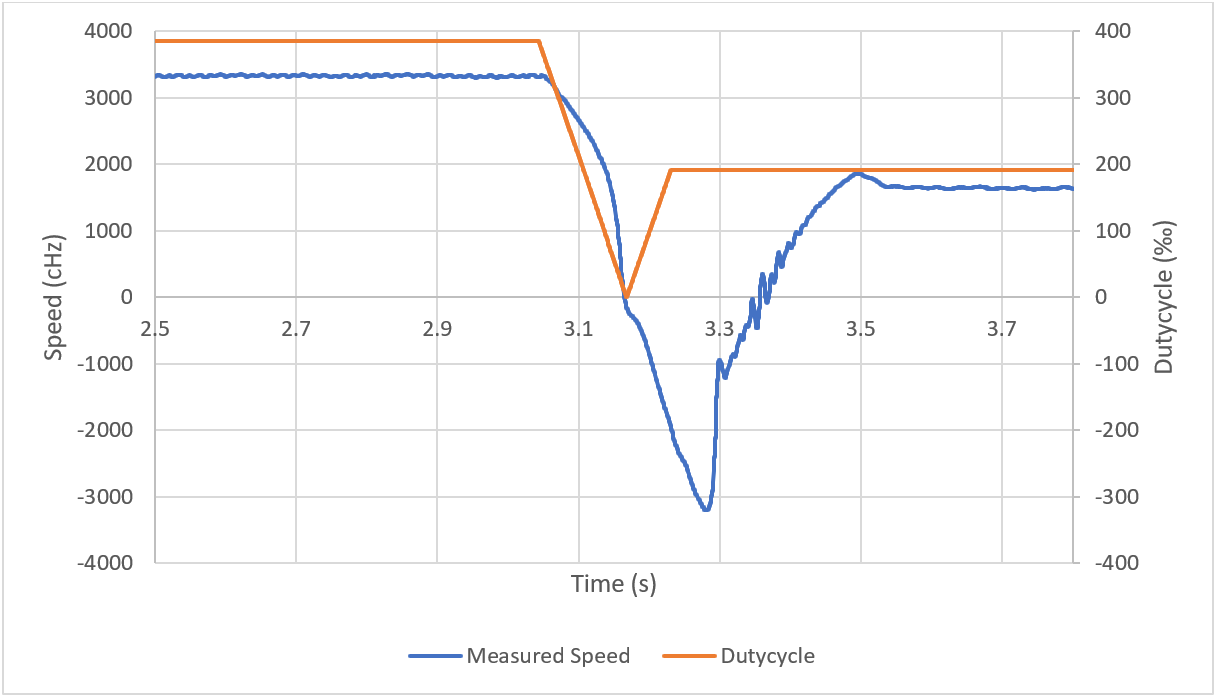
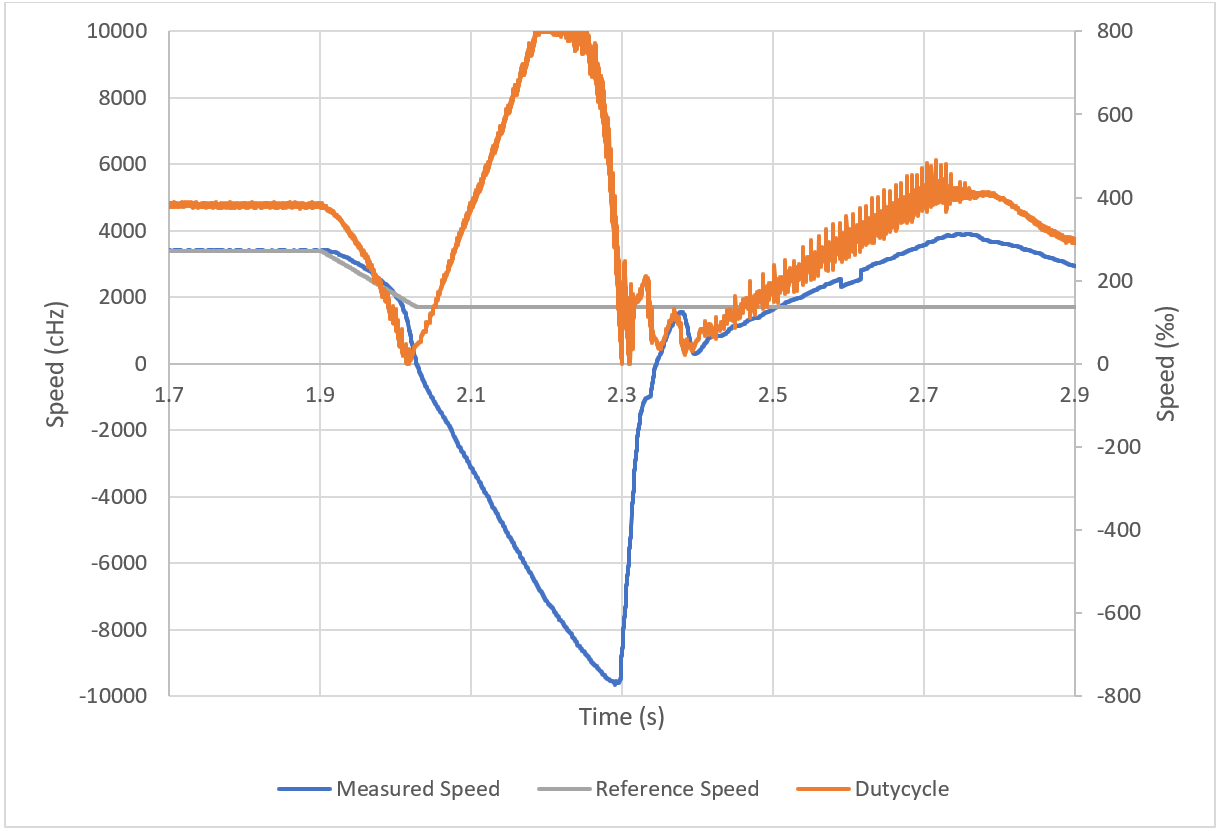
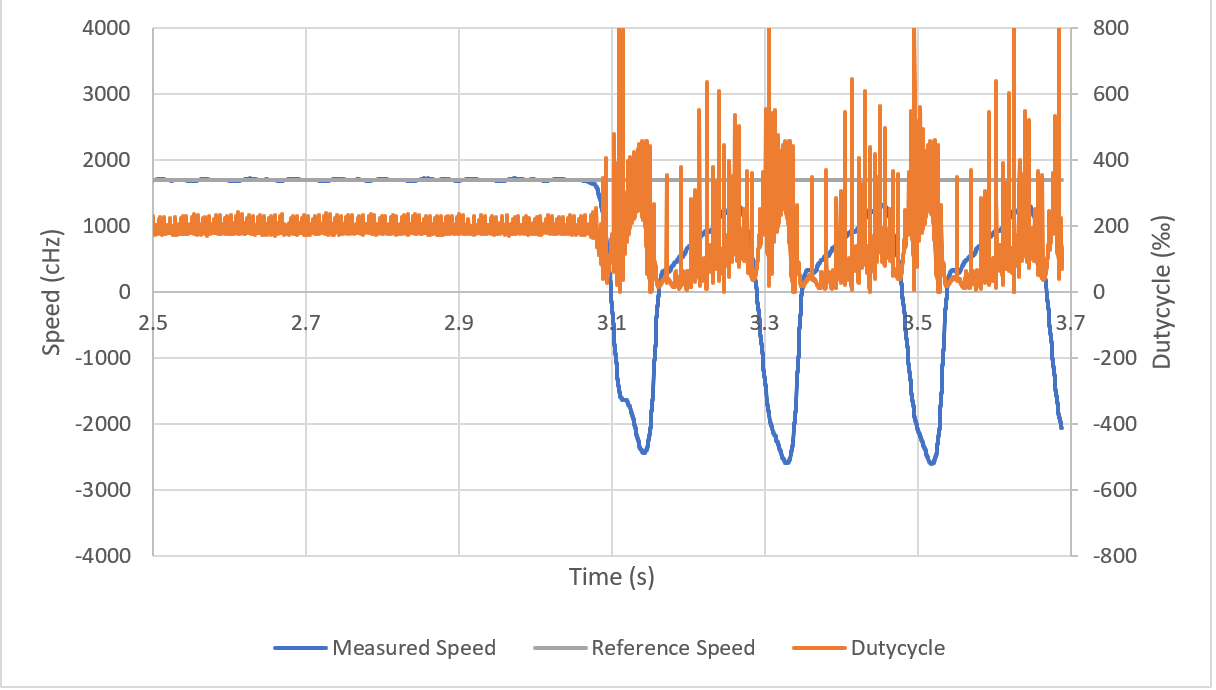
Hello, I am currently doing a project to develop a controller for a BLDC motor. The controller is implemented on the microcontroller TMS320F280049 and as the FET-Driver I use the DRV8323RH (both from Texas Instruments). So, the motor controller with a 6-step commutation algorithm is implemented using the Eval-boards from TI which are the LaunchPad LAUNCHXL-F280049C and the BoosterPack BOOSTXL-DRV8323RH (I attached the schematic of the BooserPack). The rotor position of the BLDC-motor is determined via a small magnet which is mounted on the end of the motor shaft and measured by a magnetic encoder (MA730). The controller generally works, except for apparently one abnormal behavior which can be seen in different operation modes: 1) The Direct-PWM-Mode, in which the user sets the dutycycle of the PWM manually and the controller just energizes the motor phases according to the current sector and the 6-step commutation algorithm. Here, when the dutycycle is given a (more or less) steep ramp downwards to zero and then immediately (or with a pause of a few milliseconds) a ramp upwards again the motor suddenly accelerates in backwards direction before it runs with the speed which matches the given dutycycle. (see attached Image_1.bmp) 2) Velocity-Mode, with cascaded PI-controllers for current control (inner loop) and speed control (outer loop). Here, a similar behavior is observable when the controller wants to decelerate with a steep ramp from a higher rotation speed to a lower one. (see attached Image_2.bmp) 3) Again in Velocity-Mode. This time the reference speed is kept constant. But when the motor is blocked manually it again accelerates for a moment in the wrong direction. (see attached Image_3.bmp) It is not a PI-controller issue! All the controller outputs were monitored and they always demand a movement in positive direction as you can see on the dutycycle which is the last output of the cascaded PI-controller system. It was also confirmed with oscilloscope and a datalogger that the PWM signals of the microcontroller and the gate voltages of the inverter stage match and are configured for rotation in positive direction (depending on the 6-step commutation sector). By comparing the mentioned 3 cases it seems that the problem occurs when the dutycycle decreases rather quickly and increases again. I am out of ideas of what causes this behavior and how to get rid of it. I would be thankful for any suggestions.
Attached files:
-

Image_1.bmp
3.2 MB -

Image_2.bmp
3.9 MB -

Image_3.bmp
3.2 MB
Please log in before posting. Registration is free and takes only a minute.
Existing account
Do you have a Google/GoogleMail account? No registration required!
Log in with Google account
Log in with Google account
No account? Register here.