Welche Kombination ist sinnvoll, um bei geringer Geschwindigkeit ein möglichst hohes Drehmoment zu erzeugen? Hohe Drehgeschwindigkeit mit Vollschritt und Planetengetriebe? Hohe Drehgeschwindigkeit mit Microschritt und Planetengetriebe? Langsame Geschwindigkeit mit Vollschritten? Langsame Geschwindigkeit mit Microschritten? Ich vermute, ich benötige ein Planetengetriebe. Was sagen die 1:x Werte aus? Bedeutet dies, dass das Drehmoment um den Faktor x erhöht wird, während die Geschwindigkeit um den Faktor x reduziert wird?
Hohe Drehgeschwindigkeit mit Microschritt und Planetengetriebe ist richtig. Die Annahmen zu Drehmoment/Geschwindigkeit stimmen auch. Es gibt z.B. von nanotec hervorragende Schrittmotoren/Getriebe Kombinationen.
Thorsten R. schrieb: > Hohe Drehgeschwindigkeit mit Microschritt und Planetengetriebe ist > richtig. > Die Annahmen zu Drehmoment/Geschwindigkeit stimmen auch Ich verstehe den TO so, dass mit hoher Geschwindigkeit der Ausgang am Getriebe gemeint ist. Dann sollte der Motor schnell, der Ausgang langsam sein. Zum Drehmoment: beim start, in schnellen Lauf oder beim feinen positionieren?
Für hohe Schrittgeschwindigkeit solltest du einen Motor mit maximal 2V Nennspannung nehmen. Mit Konstantstromquelle und 10-facher Spannung betreiben. Ein 30 Ohm Motor verliert die bei höherer Drehzahl an Drehmoment und in Summe würdest du ohne Getriebe ein höheres Drehmoment bekommen.
Noch ein Kommentar schrieb: > Für hohe Schrittgeschwindigkeit solltest du einen Motor mit maximal 2V > Nennspannung nehmen. Mit Konstantstromquelle und 10-facher Spannung > betreiben. Ich benötige eine äußerst niedrige Geschwindigkeit und möglichst viel Drehmoment. Thorsten R. schrieb: > Hohe Drehgeschwindigkeit mit Microschritt und Planetengetriebe ist > richtig. > > Die Annahmen zu Drehmoment/Geschwindigkeit stimmen auch. > Es gibt z.B. von nanotec hervorragende Schrittmotoren/Getriebe > Kombinationen. Prima, dann suche ich mal nach etwas passendem.
Wenn du die mal die Drehmomentkennlinie eines Steppers ansiehst siehst du das das Drehmoment bei steigender Drehzahl abnimmt.Also kleine Drehzahl und Microschritt. Bei den anderen Motorbauformen ist das anders.
:
Bearbeitet durch User
Bernd B. schrieb: > Also kleine > Drehzahl und Microschritt. Bei den anderen Motorbauformen ist das > anders. Dann frage ich mich, was besser ist? Kleine Drehzahl und Microstep oder höhere Drehzahl, Microstep und Planetengetriebe? Der eine sagt so, der andere so.
Bernd B. schrieb: > Wenn du die mal die Drehmomentkennlinie eines Steppers ansiehst siehst > du das das Drehmoment bei steigender Drehzahl abnimmt. wenn ich mir die Kennlinie anschaue bleibt sie bis zu einer bestimmten Drehzahl gleich umd nimmt dann ab, d.h. bis dahin ist alles gut
Jan schrieb: > Der eine sagt so, der andere so. Weil jeder andere Randbedingungen hat, die er auswertet um zu seiner lösung zu kommen und die Realität so aussieht, dass es einen Übergabepunkt gibt, ab dem die eine Lösung besser ist als die andere, während du blind nach einer Pauschallösung suchst, die für alles optimal ist.
mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust verbunden
Werner schrieb: > mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust > verbunden Klingt auch irgendwie logisch. Das würde bedeuten Vollschritt und Planetengetriebe. Markus schrieb: > während du blind nach einer Pauschallösung suchst, die für alles optimal > ist. Ne, das nun nicht unbedingt. 10 Umdrehungen pro Minute reichen mir und das Drehmoment sollte möglichst ausgereizt werden. Ich gebe hier keine genaue Angabe, ich schaue einfach was ich je nach Preis / Leistung hier umsetzen kann.
Jan schrieb: > 10 Umdrehungen pro Minute reichen mir und > das Drehmoment sollte möglichst ausgereizt werden. Ich gebe hier keine > genaue Angabe Ohha möchtest du batman Spielen und dich selbst am Arm irgendwo hoch ziehen? ... Na viel glück.
Joker schrieb: > Ohha möchtest du batman Spielen und dich selbst am Arm irgendwo hoch > ziehen? ... > > Na viel glück. Dafür ist dieses Forum ja bekannt.
Werner schrieb: > mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust > verbunden Moin, da habe ich ganz andere Erfahrungen gemacht. Die Spule des Motors kann die meiste Energie bei einem Sinus aufnehmen, weil da die Frequenzen kleiner sind. Im Mikroschritt wird versucht, diese Sinuskurve nachzubilden. Kauf Dir einen günstigen Treiber beim Chinamann und probiere es aus. Hohe Drehzahlen sind beim Schrittmotor eher schwierig zu erreichen. Ich habe die besten Ergebnisse und ein ruhiges Laufen mit 1/8 Mikroschritt erreicht. Gruß Carsten
Bei serioesen Schrittmotoren ist die Drehmomentkurve ja angegeben. Bei einem Getriebe liegt die Drehmomentkurve unterhalb einer Geraden, d.h. waere das Getriebe reibfrwi, dann waere es die Gerade, in der Praxis gibt es noch die Reibung, der Grossteil wohl drehzahlunabhaengig, es bleibt also nahe einer flacheren Geraden. Man kann also beide Kurven ueberlagern und mit der Kurve ohne Getriebe vergleichen. Natuerlich ist mit Getriebe ein hoeheres Moment erreichbar. Einfaxh gesagt darf die fallende Steigung des Motormomentes nicht groesser werden als die Getriebeuebersetzung, dann lohnt sich das Getriebe. Bei Schrittmotor wichtig ist, dass bei hoeheren Drehzahlen ausreichend Spannung vom Treiber auf den Motor gegeben wird, dass schnell genug kommutiert werden kann. Ausserdem braucht es an der Motorwelle ausreichend Massentraegheit um auf Drehzzahlen zu kommen, sonst kommt die Kommutierung in Resonanz und der Motor bleibt ratternd stehen.
Jan schrieb: > 10 Umdrehungen pro Minute reichen mir und > das Drehmoment sollte möglichst ausgereizt werden. Ich gebe hier keine > genaue Angabe, ich schaue einfach was ich je nach Preis / Leistung hier > umsetzen kann. Bei so geringer Drehzahl würd ich eher zu einem Schneckengetriebe raten, wenn Du die An- und Abtriebsachse nicht fluchtend haben musst. Das lässt sich zur Not auch selber machen: http://maksunaut.bplaced.net/schneckengetriebe.htm Die Getriebeübersetzung vom Drehmaschinengetriebe, um den Schneckenrad-Rohling anzutreiben brauchts nicht unbedingt, der Gewindebohrer dreht das Schneckenrad aufgrund der Steigung selbstständig ("spielfreie", aber drehbare Lagerung vorrausgesetzt)
:
Bearbeitet durch User
> ich schaue einfach was ich je nach Preis / Leistung hier > umsetzen kann. Am billigsten ist ein 30 Ohm Motor vom Restpostenhändler. Eignet sich nicht für hohe Schrittfrequenzen. Besser ohne Getriebe. Das zweitbilligste sind Motoren, für die du kein brauchbares Datenblatt findest. Du weißt nicht, bei welcher Schrittfrequenz der Motor die höchste Leistung abgibt. Getriebemotor, bei dem du alle Unterlagen zur Berechnung findest, ist halt am teuersten. Das nächste Problem sind dann Resonanzen in der Mechanik. Je billiger die Konstruktion, desto höher die Wahrscheinlichkeit, dass der Motor stehen bleibt.
Jan schrieb: > Werner schrieb: >> mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust >> verbunden > > Klingt auch irgendwie logisch. Ist aber weitgehend Unsinn. Die Blockkommutierung... Verzeihung: der Vollschrittbetrieb liefert durch das harte Ein- und Ausschalten primär die mechanischen Oberwellen, die ganz wunderbar mechanische Resonanzen im Aufbau anregen können. Bei der Sinuskomm... Entschuldigung: im Mikroschrittbetrieb entspricht der Strom- und damit der Drehmomentenverlauf ungefähr der tatsächlichen Motorbewegung; man hat deshalb VIEL weniger Ärger mit mechanischen Resonanzen. > Das würde bedeuten Vollschritt und Planetengetriebe. So ganz verstehe ich die Diskussion sowieso nicht: Gewünschtes Drehmoment und gewünschte Drehzahl definieren die notwendige (mechanische) Motorleistung. Vernünftige Stirnradgetriebe haben recht hohe Wirkungs- grade, setzen also kaum mechanische Leistung in Wärme um, sondern reichen den weitaus größten Teil der Leistung zum Abtrieb durch -- allerdings kann man durch Wahl der Übersetzung Drehzahl und Drehmoment in weiten Bereichen anpassen. Schneckenradgetriebe haben zwar schlechten Wirkungsgrad, erlauben aber extreme Verhältnisse mit nur einer Getriebestufe. Worin besteht die Unklarheit? > Ne, das nun nicht unbedingt. 10 Umdrehungen pro Minute > reichen mir und das Drehmoment sollte möglichst ausgereizt > werden. Und warum muss es unbedingt ein SCHRITTMOTOR sein? Worin besteht die Positionierungsaufgabe? > Ich gebe hier keine genaue Angabe, ich schaue einfach > was ich je nach Preis / Leistung hier umsetzen kann. Naja. Staubsaugermotor und billiges Getriebe wird vom Preis/Drehmoment-Verhältnis her nicht zu schlagen sein, denke ich.
Die Frage ist genau so sinnvoll wie: "Möglichst viel Strom aus Trafo rausholen".
Hallo Jan, Jan schrieb: > Noch ein Kommentar schrieb: >> Für hohe Schrittgeschwindigkeit solltest du einen Motor mit maximal 2V >> Nennspannung nehmen. Mit Konstantstromquelle und 10-facher Spannung >> betreiben. > > Ich benötige eine äußerst niedrige Geschwindigkeit und möglichst viel > Drehmoment. Was verstehst du unter "äußerst niedrige Geschwindigkeit"? Ein Schrittmotor gibt die maximale Leistung bei der Drehzahl ab, bei der die Kennlinie anfängt abzuknicken (wegen P=2*pi*n*M). Deswegen nutzt man gerne hohe Versorgungsspannungen, weil sich dann der Knick in der Kennlinie nach rechts verschiebt, man also mehr Leistung aus dem Motor herausholen kann. Ich interpretiere "äußerst niedrige Geschwindigkeit" mal so, dass du deutlich unterhalb dieses Knicks arbeiten willst. Dann ist ein Getriebe mit einem möglichst hohen Wirkungsgrad gefragt, z.B. ein Planten- oder Harmonic-Getriebe (teuer), aber eben kein Scheckengetriebe. Weitere Möglichkeiten sind die Verwendung eines Motors mit großem Querschnitt (Nema 34 statt Nema 17), sowie Motoren mit niedrigem Schrittwinkel (0,9° bzw. 3- oder 5-phasige Motoren mit 1,2° bzw. 0,72° Vollschritt). Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Was verstehst du unter "äußerst niedrige Geschwindigkeit"? > > Ein Schrittmotor gibt die maximale Leistung bei der Drehzahl ab, bei der > die Kennlinie anfängt abzuknicken (wegen P=2*pi*n*M). Deswegen nutzt man > gerne hohe Versorgungsspannungen, weil sich dann der Knick in der > Kennlinie nach rechts verschiebt, man also mehr Leistung aus dem Motor > herausholen kann. > > Ich interpretiere "äußerst niedrige Geschwindigkeit" mal so, dass du > deutlich unterhalb dieses Knicks arbeiten willst. Dann ist ein Getriebe > mit einem möglichst hohen Wirkungsgrad gefragt, z.B. ein Planten- oder > Harmonic-Getriebe (teuer), aber eben kein Scheckengetriebe. Es war doch nicht nach der Leistung, sondern nach dem Drehmoment gefragt. Deswegen nutzt man ja ein Getriebe, damit man eben nicht so weit unter den "Knicks" kommt, wo man keine Leistung mehr hat. D. h. man betreibt den Motor mit maximaler Drehzahl und somit Leistung (auch gern mit mehr Spannung), mit dem Getriebe reduziert man dann die Drehzahl auf den gewünschten Wert, oder eben das Drehmoment auf den gewünschten Wert, je nach dem. Von hochdynamischem Betrieb war ja auch nicht die Rede, von dem her brauchts auch kein ultra Spezialgetriebe, ausser man möchte den Bauraum speziell nutzen.
Thorsten O. schrieb: > Dann ist ein Getriebe > mit einem möglichst hohen Wirkungsgrad gefragt, z.B. ein Planten- oder > Harmonic-Getriebe (teuer), aber eben kein Scheckengetriebe. Deswegen habe ich mir mal ein 1:50 Nema23 Planetengetriebe bestellt und werde sehen wie das funktioniert.
Hermann S. schrieb: > Es war doch nicht nach der Leistung, sondern nach dem > Drehmoment gefragt. ...und genau das ist Blödsinn: Mit einem Getriebe 1:1'000'000 kann man auch ein Drehmoment von 1MNm erzeugen -- allerdings nur mit einer Umdrehung pro Monat...
Grummler schrieb: > Hermann S. schrieb: > >> Es war doch nicht nach der Leistung, sondern nach dem >> Drehmoment gefragt. > > ...und genau das ist Blödsinn: Mit einem Getriebe 1:1'000'000 > kann man auch ein Drehmoment von 1MNm erzeugen -- allerdings > nur mit einer Umdrehung pro Monat... Ja aber genau das war doch die Frage: "...um bei geringer Geschwindigkeit ein möglichst hohes Drehmoment zu erzeugen?" Soll heissen...Umdehungsgeschwindigkeit ist egal, hauptsache das Moment ist möglichst hoch. Oder hab ich da was falsch verstanden? Und den Motor hat er ja schon, d. h. die maximale Leistung ist bereits vorgegeben.
:
Bearbeitet durch User
Hermann S. schrieb: > Soll heissen...Umdehungsgeschwindigkeit ist egal, hauptsache das Moment > ist möglichst hoch. Ich brauche ca. 2 bis 8 RPM.
Werner schrieb: > mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust > verbunden Das kommt drauf an, ob du RMS-Strom oder Peak-Strom betrachtest
Angehängte Dateien:
-

1.png
23 KB
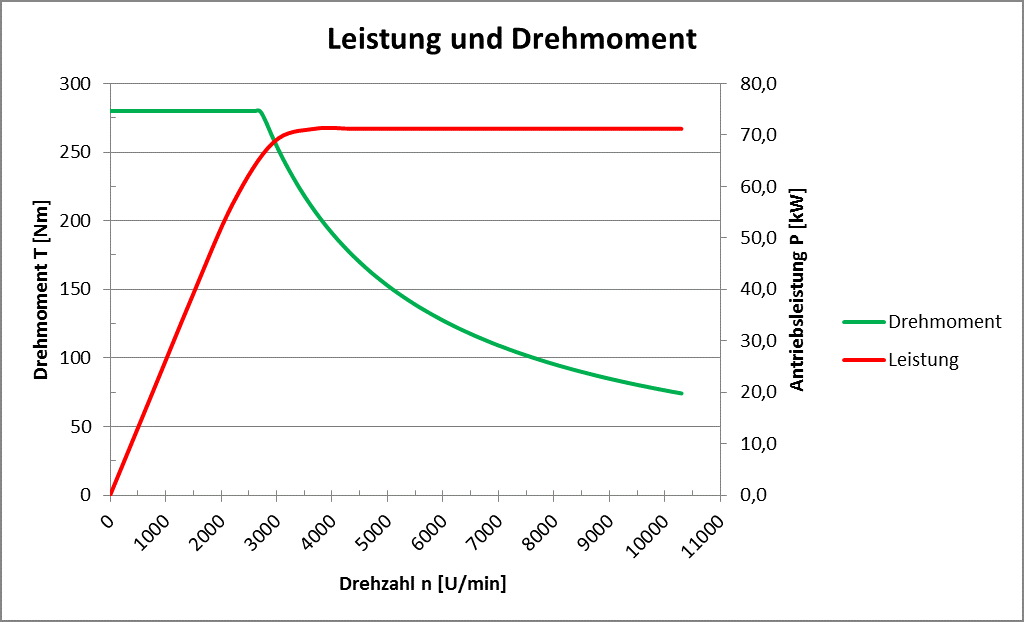
Jan schrieb: > Hermann S. schrieb: >> Soll heissen...Umdehungsgeschwindigkeit ist egal, hauptsache das Moment >> ist möglichst hoch. > > Ich brauche ca. 2 bis 8 RPM. Dann ist es eine ganz einfache Rechnung (Wirkungsgrad aussen vor): max. Motordrehzahl (bei max. Moment) / max. gewünschte Abtriebsdrehzahl = Übersetzungsverhältnis Getriebe max. Drehmoment Motor * Übersetzungsverhältnis Getriebe = max. Drehmoment Abtrieb Wenn Du die Drehzahl am Abtrieb dann über den Motor von 8 rpm auf 2 rpm runter stellst, bleibt das Drehmoment gleich, jedoch hast Du halt dann weniger Leistung, weil wie Thorsten schon schrieb: P=2*pi*n*M; siehe auch Bild anbei
:
Bearbeitet durch User
Grummler schrieb: >>> mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust >>> verbunden >> >> Klingt auch irgendwie logisch. > > Ist aber weitgehend Unsinn. kannst du diese liebevolle Aussage auch begründen? Erst Mal hat ein Sinussignal integriert weniger Strom als ein Rechtecksignal. Das kann man natürlich kompensieren indem man den Spitzenstrom um den Faktor Wurzel 2 hochdreht. Dabei muss man aber beachten den Strom wieder zu reduzieren wenn der Motor steht. Das alles gilt nur theoretisch, in der Praxis gibt es durch weitere Verluste ein geringeres Drehmoment als im Vollschrittbetrieb (siehe http://www.controllersandpcs.de/pdfs/schrittmotoren.pdf Seite 24)
Hallo Werner, Werner schrieb: > Grummler schrieb: >>>> mikrostep ist im Vergleich zu Vollschritt mit Drehmomentverlust >>>> verbunden >>> >>> Klingt auch irgendwie logisch. >> >> Ist aber weitgehend Unsinn. > > kannst du diese liebevolle Aussage auch begründen? Die Begründung ist weiter oben schon gegeben worden. > Erst Mal hat ein Sinussignal integriert weniger Strom als ein > Rechtecksignal. Das kann man natürlich kompensieren indem man den > Spitzenstrom um den Faktor Wurzel 2 hochdreht. > Dabei muss man aber beachten den Strom wieder zu reduzieren wenn der > Motor steht. Nein, muss man nicht. Rechne mal nach ;) Wenn eine Phase auf dem Spitzenwert vom Sinus ist, ist der Cosinus (also die andere Phase) Null. Die Verlusleistung bezogen auf den ganzen Motor ist also konstant, egal in welchem Mikroschritt der Motor angehalten wird. Eine Stromabsenkung im Stillstand ist natürlich trotzdem sinnvoll. Aber aus den gleichen Gründen wie bei Voll- oder Halbschritt. > Das alles gilt nur theoretisch, in der Praxis gibt es durch weitere > Verluste ein geringeres Drehmoment als im Vollschrittbetrieb > (siehe http://www.controllersandpcs.de/pdfs/schrittmotoren.pdf Seite 24) Das Dokument ist wild ohne ordentliche Zitate aus diversen Quellen (u.a. alte Datenblätter von ST) zusammenkopiert. Der Autor hat offensichtlich keinen nennenswerten eigenenen Beitrag geleistet. Was willst du mit dieser "Quelle" genau beweisen? Mit freundlichen Grüßen Thorsten Ostermann
:
Bearbeitet durch User
Hermann S. schrieb: > Grummler schrieb: >> Hermann S. schrieb: >> >>> Es war doch nicht nach der Leistung, sondern nach dem >>> Drehmoment gefragt. >> >> ...und genau das ist Blödsinn: Mit einem Getriebe 1:1'000'000 >> kann man auch ein Drehmoment von 1MNm erzeugen -- allerdings >> nur mit einer Umdrehung pro Monat... > > Ja aber genau das war doch die Frage: > "...um bei geringer Geschwindigkeit ein möglichst hohes > Drehmoment zu erzeugen?" Sachlich richtig -- aber das ist eben eine bescheuerte Frage, weil die Antwort darauf die Unendlichkeitsmaschine ist... (beliebig viel Drehmoment bei ungefähr 0 U/min). > Und den Motor hat er ja schon, d. h. die maximale Leistung > ist bereits vorgegeben. Naja, dann kann der TO ja ausrechnen, welches Drehmoment er bei den gewünschten max. 10U/min herausbekommt. Wo ist also sein Problem?
Jan schrieb: > Hermann S. schrieb: >> Soll heissen...Umdehungsgeschwindigkeit ist egal, hauptsache >> das Moment ist möglichst hoch. > > Ich brauche ca. 2 bis 8 RPM. Okay, immerhin ein Anfang. Der gute Wille ist erkennbar. Nehmen wir mal großzügig 12 U/min an, das sind gerade 0.2 U/s, wenn ich mich nicht verrechnet habe. Jetzt die andere Hälfte: Welches Drehmoment brauchst Du? (Eine konkrete ZAHL bitte -- und nicht "Möglichst viel"! Die Schiffswelle, die "möglichst viel" Drehmoment aushält, passt nicht in Dein Wohnzimmer!)
Werner schrieb: > Grummler schrieb: >>>> mikrostep ist im Vergleich zu Vollschritt mit >>>> Drehmomentverlust verbunden >>> >>> Klingt auch irgendwie logisch. >> >> Ist aber weitgehend Unsinn. > > kannst du diese liebevolle Aussage auch begründen? Ich dachte, das hätte ich schon...?! > Erst Mal hat ein Sinussignal integriert weniger Strom > als ein Rechtecksignal. Das kann man natürlich > kompensieren indem man den Spitzenstrom um den Faktor > Wurzel 2 hochdreht. Richtig. > Dabei muss man aber beachten den Strom wieder zu reduzieren > wenn der Motor steht. Jein: Der Schrittmotor hat (i.d.R.) zwei Stränge, die sich elektrisch wie Sinus und Cosinus verhalten. Soll heißen: Man hat NIEMALS volle Leistung auf beiden Strängen -- es ist im Gegenteil so, dass die gesamte Verlust- leistung konstant ist, und zwar für jeden beliebigen (elektrischen) Winkel. Das liegt einfach daran, dass der Radius eines Kreises für alle Punkte auf dem Kreis konstant ist... > Das alles gilt nur theoretisch, in der Praxis gibt es > durch weitere Verluste ein geringeres Drehmoment als > im Vollschrittbetrieb Ja; durch den Stromchopperbetrieb entstehen zusätzliche Verluste. Das macht aber nur ein paar Prozent aus (m.W. unter 10%). Um diesen 10% gerecht zu werden, schrieb ich auch "ist weitgehend Unsinn" und nicht "ist kompletter Unsinn" :) Der geringe Verlust ist natürlich da, aber so knapp, dass der ins Gewicht fällt, sollte man seinen Antrieb sowieso nicht auslegen... Ansonsten hat ein halbwegs stetiges Drehfeld (vulgo: Mikro- schrittbetrieb) deutlich mehr Vor- als Nachteile.
Grummler schrieb: > Jan schrieb: > >> Hermann S. schrieb: >>> Soll heissen...Umdehungsgeschwindigkeit ist egal, hauptsache >>> das Moment ist möglichst hoch. >> >> Ich brauche ca. 2 bis 8 RPM. > > Okay, immerhin ein Anfang. Der gute Wille ist erkennbar. > > Nehmen wir mal großzügig 12 U/min an, das sind gerade > 0.2 U/s, wenn ich mich nicht verrechnet habe. > > Jetzt die andere Hälfte: Welches Drehmoment brauchst Du? > > (Eine konkrete ZAHL bitte -- und nicht "Möglichst viel"! > Die Schiffswelle, die "möglichst viel" Drehmoment aushält, > passt nicht in Dein Wohnzimmer!) Jetz sehs doch nicht so eng. Die Frage war doch, mit welcher Kombination man niedrige Drehzahl und hohes Drehmoment aus einem Schrittmotor rausholt. Erst mal unabhängig von irgendwelchen konkreten Werten. Seine Frage hätte man ganz einfach mit 1, 2, 3 oder 4 beantworten können ;-) Wenn er sagt, er braucht 12 1/min. bei 100 Nm...dann sind das ~260 W. Er hat aber schon einen Motor...keine Ahnung der hat meinetwegen nur 200 W. Der Motor samt Getriebe schafft dann halt nur ~76 Nm bei 12 1/min. Deine Rechnung macht sinn, wenn man noch keinen Motor hat^^ Wenn er natürlich rauslassen würde, was er schon hat, und was er genau braucht, oder damit machen will, kann man Ihm natürlich noch besser helfen. Denn ich bezweifle stark, dass er weiß, wieviel Drehmoment er am Abtrieb braucht.
Jan schrieb: > Hohe Drehgeschwindigkeit mit Microschritt und Planetengetriebe? Da ich nur Umdrehungen von 2 bis 8, maximal 10RPM benötige habe ich nun ein 1:50 Planetengetriebe montiert. Microschritte und als absolutes Maximum 1000RPM am Schrittmotor und alles läuft bestens. Kann sein, dass ich nun übertrieben viell Drehmoment habe aber das ist egal.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.