Hallo! Habe folgendes "Problem". Fahre einen Oldtimer mit modernem Einspritzmotor und Getriebe. Das Getriebe hat leider nur noch einen elektronischen Sensor oder man kann das TTL-Geschwindigkeitssignal des Einspritzgerätes nutzen (4000 Pulse pro Meile). Möchte nun mit einem Elektromotor den Tacho entsprechend antreiben. In den USA gibt es fertige Geräte aber für 400$ plus. Diese Geräte werden durch einen geregelten Gleichstrommotor angetrieben (man sieht eine Gabellichtschranke, die eine Lochscheibe an der Motorachse abfrägt). Ich denke man könnte auch einen Schrittmotor mit entsprechendem Steuermodul einsetzen, das einen direkten TTL-Eingang hat. Leider kenne ich mich zu wenig aus, um das Ganze umsetzen zu können, deshalb benötige ich hier entsprechende Hilfe. Danke für Tipps im voraus!
Man könnte einen kleinen Schrittmotor an einen L293D anschliessen und den Tachoimpuls an CLK anschliessen, dann dreht der übliche 200 Schritte Schrittmotor bei 160km/h mit 2 Umdrehungen pro Sekunde. Das ist für eine Tachowelle recht langsam und total unangepasst. Du bräuchtest also noch ein (einstellbares?) Getriebe um die Umdrehungsgeschwindigkeit des Schrittmotors an die benötigte Umdrehungsgeschwindigkeit der Tachoantriebswelle anzupassen. Das ist aufwändige Mechanik, die man besser elektronisch löst, aber das kannst du nicht,xeinen rate multiplier aufbauen oder einen Mikrocontroller prigrammieren das zu tun.
MaWin schrieb: > einen rate multiplier ... Das klingt sehr kompliziert. Nenn es doch einfach "Frequenzvervielfacher", das hört sich nicht so abgehoben an.
Moin Forum, hallo Niterider, wo liegt denn jetzt das Problem? Es muss ein kleiner DC-Motor mit einer variablen Spannung betrieben werden. Denken wir uns mal einen MOSEFT-Sourcefolger, dessen Gate von einem Kondensator gesteuert wird. Wenn die Kleinmotor-Drehzahl zu hoch ist, so wird die Kondensatorspannung vermindert. Und wenn sie zu niedrig ist, so wird sie erhöht. Ob die Drehzahl zu hoch oder zu niedrig ist, das entscheidet ein Phasenvergleicher. Wir kennen derartige Schaltungen von PLLs. Nur in unserem Fall müssen wir halt die Drehzahl des Kleinmotors mit der Drehzahl der Steuerimpulse vergleichen. Dazu genügt tatsächlich eine auf der Achse des Kleinmotors angebrachte Scheibe mit einen oder mehreren Löchern und eine Gabellichtschranke aus ner alten PC-Maus. Ganz genau wie bei den teuren Industriegeräten. Mehr als 10 diskrete Bauteile sollten wir nicht verballern. Die Berechnung und Konstruktion macht das Forum. Schwierige Mechanikarbeiten sind auch nicht nötig: es beschränkt sich auf die Ankopplung der Tachowelle und Anfertigung/Abtastung der Scheibe. Und die paar Bauteile wird Niterider ja wohl zusammenlöten können. Wie siehts aus, Niterider? Wär das ein denkbarer Lösungsweg für Dich? VG Fred
:
Bearbeitet durch User
Niterider schrieb: > Möchte nun mit einem > Elektromotor den Tacho entsprechend antreiben. Ist der Motor schon vorhanden und wieviel Platz steht zur Verfügung? 0815 schrieb: > MaWin schrieb: >> einen rate multiplier ... > > Das klingt sehr kompliziert. Nenn es doch einfach > "Frequenzvervielfacher", das hört sich nicht so abgehoben an. Mit einem 'rate multiplier' wird eine Eingangsfrequenz reduziert, derat, dass zum Beispiel für 16 Eingangsimpulse 7 Ausgangsimpulse ausgegeben werden. Heute läuft das mehr unter dem Stichwort DDS. Für Frequenzvervielfachung gibt es einfache Schaltungen, z.B. http://www.mino-elektronik.de/Generator/takte_impulse.htm#bsp4 oder man programmiert eine Schaltung entsprechend um: Beitrag "Schrittmotoransteuerung mit A4982 und ATmega328", dass die Eingangsfrequenz direkt in Motordrehzahl umgesetzt wird. Ein Schrittmotor hat den Vorteil, dass die Drehzahl nicht gemessen werden muß. Ein DC-Motor läßt sich dafür leichter ansteuern. Das würde ich danach entscheiden, was mechanisch am einfachsten zu lösen ist.
m.n. schrieb: > Mit einem 'rate multiplier' wird eine Eingangsfrequenz reduziert, derat, > dass zum Beispiel für 16 Eingangsimpulse 7 Ausgangsimpulse ausgegeben > werden. Heute läuft das mehr unter dem Stichwort DDS. Früher hätte man eine PLL verwendet. Ob ein "rate multiplier" die Impulsrate reduzieren oder erhöhen soll, wie es der Begriff "multiplier" suggeriert, steht noch auf einem anderen Blatt.
Wolfgang schrieb: > Früher hätte man eine PLL verwendet. Ob ein "rate multiplier" die > Impulsrate reduzieren oder erhöhen soll, wie es der Begriff "multiplier" > suggeriert, steht noch auf einem anderen Blatt. Eine PLL würde auch noch heute funktionieren. Zum 'rate multiplier' noch ein Datenblatt des klassichen CD4089. http://www.classiccmp.org/rtellason/chipdata/cd4089.pdf Wie man sieht, wird tatsächlich multipliziert: Faktor 1/16 ;-)
m.n. schrieb: > Mit einem 'rate multiplier' wird eine Eingangsfrequenz reduziert, derat, > dass zum Beispiel für 16 Eingangsimpulse 7 Ausgangsimpulse ausgegeben > werden. Heute läuft das mehr unter dem Stichwort DDS. Nein. Ein rate multiplier ist keine DDS und kein Frequenzvervielfacher. Zwar gibt es welche (wie CD4089) die nur teilen können, aber das Wort multiplier drückt schon aus, daß es mir um die Erhöhung geht. Fred Quinny schrieb: > Nur in unserem Fall müssen wir halt die Drehzahl des Kleinmotors > mit der Drehzahl der Steuerimpulse vergleichen. Na ja, wir haben schon festgestellt, daß da wohl kein 1:1 Zusammenhang besteht. Analoge Schaltungen haben das Problem, daß ein Tacho schon die richtige Geschwindigkeit anzeigen soll. Geht man davon aus, daß der mechanische Tacho alleine schon ungenau genug ist, darf die Elektronik keine weitere Ungenauigkeit bringen. Bleibt die digitale Schaltung. Kann man als PLL bauen, kann man digital als PID Regler bauen der die Regelstreckeneigenschaften des DC Motors berücksichtigt, aber einfacher ist wohl der Schrittmotor weil man sich bei ihm den Sensor sparen kann. Die Maximaldrehzahl eines kleinen Schrittmotors (mit weniger als 200 Schritten) wird ausreichen, die Kraft auch. Die Grundidee von Niterider ist also vernünftig, nur braucht es den uC, der die Drehzahlanpassung macht.
MaWin schrieb: > Ein rate multiplier ist keine DDS und kein Frequenzvervielfacher. > > Zwar gibt es welche (wie CD4089) die nur teilen können, aber das Wort > multiplier drückt schon aus, daß es mir um die Erhöhung geht. Der CD4089 multipliziert ja auch, aber nur die zuvor um 16 geteilte Taktfrequenz. DDS macht im Prinzip das gleiche, indem ein Akkumulator Überläufe (Impulse) erzeugt, die auch die Taktfrequenz nicht übersteigen können. MaWin schrieb: > Die Grundidee von Niterider ist also vernünftig, nur braucht es den uC, > der die Drehzahlanpassung macht. Hinzu kommt, dass eine digitale Lösung auch niederfrequente Signale innerhalb einer Periode verarbeiten kann. Eine PLL erzeugt immer synchrone Ausgangsfrequenzen, wobei die Synchronisierung aber auch ihre Einschwingzeit braucht. Ein µC kann zu einem Eingangssignal auch eine asynchrone Frequenz erzeugen, weshalb dieser Vorgang erheblich schneller geht und eine wesentlich höhere Dynamik haben kann.
MaWin schrieb: > Analoge Schaltungen haben das Problem, daß ein Tacho schon die richtige > Geschwindigkeit anzeigen soll. Hast du schon mal Tachos nachgemessen und ist dir dabei irgendeiner begegnet, der die richtige Geschwindigkeit anzeigt, d.h. dessen Genauigkeit in der Größenordnung der Auflösung der Anzeige stand? Wofür gibt es Toleranz- und Messgenauigkeitsangaben mit denen man umgehen können muss. Bei einem Auto ändert sich durch Abnutzung auch der Durchmesser der Räder und führt zu einem sich ändernden Skalierungsfaktor zwischen Drehzahl der Räder und Geschwindigkeit. Da bei Autotacho eine Unterschätzung der Geschwindigkeit eher unkritisch ist, wird man sich mit dem Skalenfaktor also auf die sichere Seite legen können.
MaWin schrieb: > Fred Quinny schrieb: >> Nur in unserem Fall müssen wir halt die Drehzahl des Kleinmotors >> mit der Drehzahl der Steuerimpulse vergleichen. > Na ja, wir haben schon festgestellt, daß da wohl kein 1:1 Zusammenhang > besteht. > Analoge Schaltungen haben das Problem, daß ein Tacho schon die richtige > Geschwindigkeit anzeigen soll. Hallo MaWin, das Tachometer bei so alten Autos ist ja erstmal ne Wirbelstrombremse mit quadratisch steigender Federkraft, die dazu führt, dass der Zeigerausschlag proportional zur Tachowellendrehzahl ist. Das ist ja gerade der Trick an den Dingern. Weiterhin wird es wohl so sein, dass die angelieferten Impulse geschwindigkeitsabhängig sind. Und unsere Elektronik fällt durch den Phasenvergleicher komplett raus. Eine eingeschwungene PLL produziert keinen Frequenz- sondern höchstens einen Phasenfehler. Die einzige Ungenauigkeit des Systems entsteht eben in dem alten Tacho. Aber das soll ja in jedem Fall weiterverwendet werden, vermute ich mal. ---------- Man könnte es sich allerdings auch ganz einfach machen und einfach die alte Tachomechanik entkernen und den Drehzeiger direkt von einem Schrittmotor antreiben Beitrag "Re: Kleine Helferlein" VG Fred
:
Bearbeitet durch User
Sofern es mit der Drehzahl hinkommt, könnte man es mit einem Schrittmotor machen. Es gibt auch welche mit nur 48 Schritten pro Umdrehung. Je nach Treiber und Spannung kommt man meist relativ gut bis 500 Schritte je Sekunde (mit hoher Spannung und wenig Last ggf. auch mehr). Das wären dann 10 U/Sekunde. Ggf. sollte man noch etwas Reserve einplanen, also eher von maximal 5 /s ausgehen. Wenn es deutlich schneller sein muss, wäre wohl eine DC motor und Regelung per Encoder einfacher. Die Regelung ist dann so etwas wie ein PLL, mit dem Motor / Encoder als VCO. Das könnte man klassisch mit Logic und "analog" aufbauen, oder auch per µC. Auch mit einem Schrittmotor Treiber wie der alten Kombination L293 / L297 wäre da eine Art PLL gefragt.
MaWin schrieb: > Und dann muss das alles noch durch den TÜV.. > Einzelabnahme. Es stellt sich mir sowieso die Frage, ob der TE zur Zeit ohne Tacho fährt....
Fred Quinny schrieb: > Es stellt sich mir sowieso die Frage, ob der TE zur Zeit ohne Tacho > fährt.... In der Zeitschrift Focus empfehlen Rechtsanwälte immer wieder, man soll ohne Führerschein fahren, damit er einem nicht abgenommen werden kann. Vielleicht empfehlen die auch, ohne Tacho zu fahren, damit man wegen zu schnellen Fahrens nicht bestraft werden kann... Georg
Hallo! Zuerst mal vielen Dank für die vielen Antworten und Lösungsansätze. Nun zu einigen Antworten: TÜV ist kein Thema, habe einen Fahrradtacho montiert, der das Hinterrad abfrägt. Komme schon seit Jahren so durch den TÜV. Insofern wäre auch die Genauigkeit nicht ganz so im Vordergrund, Hauptsache der Tacho bewegt sich mal wieder, +/- 5 km/h würde ich akzepzieren (der genaue Fahrradtacho bleibt eh im Fahrzeug). Wie schnell die Tachowelle pro km bzw. Meile sich drehen muss, habe ich irgendwo, muss ich nur noch nachschauen. Mechanischer Aufbau ist kein Thema, hab ne Dreh- und Fräsmaschine etc. Platztechnisch kann ich die Tachowelle nutzen, d.h. irgendwo hinterm Armaturenbrett, d.h. kein Problem. Wenn mir jemand die Schaltung aufbaut kann ich alles selber löten, ganz so unbedarft in Richtung Elektronik und Zusammenlöten bin ich nicht. Für den Schaltplanaufbau und Stückliste bezahle ich auch gerne etwas, habe ich kein Problem mit, funktionieren muss es dann aber logischerweise. Jetzt aber konkret => Analog oder digital Schrittmotor => Was ist einfacher, wer kann einen Schaltplan erstellen? Danke für Antworten im voraus.
Es ist noch eine Frage offen.. Beitrag "Re: Ansteuerung Schrittmotor" Wieviel Umdrehungen pro Meile muß der Tacho abbekommen?
Hallo! Habe jetzt nachgeschaut => 60 Meilen pro Stunde (mph) (96 km/h) müssen 1000 Umdrehungen pro Minute sein => 1 Meile sind 1000 Umdrehungen und diese entsprechen dann den genannten 4000 Impulse pro Meile des Steuergerätes.
Wie muss ich mir das hier im Thread vorstellen? Wir sollen also einen Schaltplan konstruieren? Und das Gerät soll dann einer für Geld aufbauen? Also irgendwie will mir das nicht gefallen. Nehmen wir da gerade einem Kollegen nen Bezahl-Auftrag weg? Dadurch, dass wir das Schaltbild unentgeltlich konstruieren? Ich komm gerade nicht ganz klar mit der neuen Situation. VG Fred
Hallo! Nein, ganz so kommerziell denke ich nicht / war nicht so zu verstehen: Hab mir nur gedacht, wenn sich jemand hinsetzt und einen Schaltplan evtl. mit Stückliste erstellt komme ich gerne mit einer kleinen Art Zeitaufwandsentschädigung dafür auf. Ist ja vermutlich nicht in 5 Min erledigt. Wenn die Infos hier im Forum so gut sind, dass ich die Schaltung vollends selbst verstehe und entwerfen kann soll es mir auch recht sein, nur befürchte ich, bin ich hierzu doch etwas zu weit weg. Meine Elektronikkenntnisse gehen nicht übers techn. Gymnasium hinaus. Die Teile dann kaufen, aufbauen etc. kann ich dann getreu dem Schaltplan selbst. Einen Schaltplan kann ich lesen und das Ganze auf einer Platine aufbauen und in ein Gehäuse mit entsprechenden Buchsen / Steckern versehen auch.
Ok... dann fass ich mal zusammen. Vom Steuergerät kommen 4 TTL-Impulse auf jede Umdrehung der Tachowelle. Nun gibt es zwei Ansätze für den Antrieb der Tachowelle. Entweder per Schrittmotor und Controller. Oder mit einer Lichtschranken-PLL und DC-Kleinmotor. Kannst Du noch ein wenig mehr zu den TTL-Impulsen sagen? Wie lang sind die? Sind die aktiv high? VG Fred
:
Bearbeitet durch User
Ich denke, dass ich die analoge Motorregelung mit PLL komplett mit weniger als 10 diskreten Bauteilen hinbekomme. Hängt jetzt von Niteriders Angaben zum TTL-Impuls ab.
:
Bearbeitet durch User
Hallo! Hab jetzt was gelesen von 3-500 ms. Was heißt aktiv high? Könnte zur Not mir ein Oszi ausleihen und probieren die Signale zu messen, wenn dies erforderlich ist.
Das wären 4 Impulse pro Umdrehung, sehe ich das richtig? Mit einem Schrittmotor mit 7,5° wäre das eine Übersetzung von 6:1, die ließe sich in einen uC reinpacken statt einer mechanischen Übersetzung. Allerdings erfordert eine solche Lösung ein wenig mehr als 10 Bauteile, bis sie Kfz-fest ist.
Hallo! Wichtig ist eine gut funktionierende Lösung, 10 oder 20 Bauteile ist nicht so wichtig (allerdings nicht zu komplex), der Aufwand ist es mir wert wieder einen Tacho zu haben. Eine elektronische Lösung wäre mir da auch lieber als ein Getriebe.
Ich bin mal gespannt auf die weniger-als-10-Bauteile-Lösung. Mindestens so viel bräuchte ich schon zur Erzeugung von 5V im Auto. Mikrocontroller + Schrittmotor kämen noch einmal auf ungefähr 10 Bauteile. Vielleicht kann aber auch ein Arduino-Bewanderter hier einspringen. Dafür gibts gleich fertige "Schrittmotor-shields", damit wär die Elektronik schon zu einem großen Teil günstig und bereits aufgebaut kaufbar.
Hallo! Ist mir noch eingefallen, hier der Link zum Originalteil mit Bildern der Elektronik. Diese sieht nicht unkomplex aus. Aber wie gesagt, ich brauche nichts hochgenaues, evtl. ist die Elekronik dann einfacher. Oder eben die Schrittmotorvariante mit viel vorgefertigter Elektronik. Überlasse ich aber den Spezialisten hier im Forum. http://www.atrol.com/cx30/
Angehängte Dateien:
-

tacho1.jpg
20 KB

Helge A. schrieb: > Ich bin mal gespannt auf die weniger-als-10-Bauteile-Lösung. Ok... ich setz mich mal ran. Etwas doof sind allerdings die TTL-Pulse mit variabler Länge. Ich hatte mir konstante Länge erhofft. Da brauch ich noch ne extra Tasse Kaffee. Ansonsten hab ich mir die Mechanik genauso vorgestellt wie in Niteriders Link. DC-Motor, Lochscheibe und Gabellichtschranke aus alter Computermaus. "Programmiert" wird bei uns durch die Anzahl der Löcher in der Scheibe. Wir brauchen vier Löcher, denn wir wollen ja pro vier Impulsen eine Umdrehung erzielen.
:
Bearbeitet durch User
Niterider schrieb: > Eine elektronische Lösung wäre mir da auch lieber als ein Getriebe. Es ist immer gut, wenn man zwei Wege verfolgt. Hier im Thread gibts einen high-tech- und einen low-tech-Weg. Der low-tech-Weg ist eher als Denksportaufgabe zu verstehen, wie einfach man die Lösung darstellen kann. Das macht mir persönlich stets am meisten Spaß. Praxistauglicher ist aber möglicherweise die high-tech-Lösung. VG Fred
:
Bearbeitet durch User
Niterider schrieb: > Hab jetzt was gelesen von 3-500 ms. Was heißt aktiv high? > Könnte zur Not mir ein Oszi ausleihen und probieren die Signale zu > messen, wenn dies erforderlich ist. Hast Du keine Unterlagen über den Speedsensor? Edit: hat sich erledigt. Ich weiß Bescheid. VG Fred
:
Bearbeitet durch User
Hallo! Ich find das spannend. Also, ich würde hier keinen Schrittmotor einsetzen. Schrittmotoren sind sinnvoll, wenn man die Position kontrollieren will, Du brauchst aber eine Lösung, die die Geschwindigkeit regelt. Wie wäre es mit folgendem Ansatz: Das Signal vom Tachogeber im Getriebe wird gefiltert (Tiefpass, Überspannungsschutz), um Spikes zu entfernen, und wird dann auf ein Monoflop geführt, der die Pulslänge fixiert. Jeder dieser Pulse lädt über einen Widerstand einen Kondensator auf. Der Kondensator definiert die Gate-Spannung an einem MOS-Fet, der einen DC-Motor steuert, der die Tachowelle dreht. Auf der Tachowelle sitzt eine Lichtschranke, die für jede Umdrehung eine bestimmte Anzahl von Pulsen liefert, die (ebenfalls nach Monoflop) den Kondensator entladen. Damit hast Du so etwas wie ein elektronisch einstellbares Getriebe. Die Übersetzungszahl kannst Du (je nach Gusto) über das Verhältnis der Pulslängen oder das Verhältnis der Lade-/Entladewiderstände einstellen. Selbstverständlich kannst Du dasselbe Verhalten mit einem Microcontroller realisieren, der aber praktisch dasselbe tut: Kondensator->Akkumulator, Ladewiderstand->Summand, Entladewiderstand->Subtrahend, Gate-Spannung->PWM-Ausgang Ob es mit 10 Bauteilen hinkommt, wage ich zu bezweifeln. Automotive-Technik braucht immer eine gewisse Schutzbeschaltung, um zuverlässig zu funktionieren; der Aufwand, den Du treiben willst, legt nahe, dass es hier nicht um einen Golf II geht, aber allzu komplex wird es nicht, denke ich. Was meint Ihr? Stefan
Ich will mal beschreiben, wie ich vorgehen werde... Ich verstehe den DC-Motor mit Lochscheibe und Lichtschranke als "VCO". Wenn ich die Motor-Spannung anhebe, so erzeugt die Lichtschranke eine höhere Frequenz. Ein VCO ist ein wesentliches Element einer Phasenregelschleife (PLL). Der gesamte "VCO" besteht aus DC-Motor, Lichtschranke, MOSFET-Sourcefolger und einem Kondensator zwischen Gate und Masse. Ein Source-Folger ist für automotive ohne weitere Schutzschaltungen verwendbar. Es ist eigensicher. Bisher also vier Teile. Das zweite Element einer PLL ist der Phasenvergleicher. Jeder denkt da an komplizierte XOR-Gatter und Flipflop-Systeme und haste-nicht-gesehen. Vergessen wird aber, dass schon die alten CRT-TVs einen Horizontaloszillatorregelkreis mit Phasenvergleicher besaßen, der die empfangenen Synchronimpulse mit der selbst erzeugten Horizontalfrequenz zur Deckung brachte. Damals kannte man nur das Wort "PLL" noch nicht ;) Erleichternd ist, dass ich mir die Impulsform der Lichtschranke frei bestimmen kann. Ich kann Langlöcher oder punktförmige Löcher vorgeben, also Inversionen erzielen. Wie auch immer: die Kunst ist jetzt, den Phasenvergleicher mit sechs Bauteilen "abzufackeln" - und zwar automotive. Schwierig. Aber möglich.... VG Fred
:
Bearbeitet durch User
Hallo! Ich bin überrascht über das Interesse an meinem Problem / Aufgabe. Aber es soll mir natürlich recht sein! Um auch diese Frage zu beantworten. Das Auto ist ein Chevrolet Camaro Bj 69 (Designpate des neuen 2010 Camaro) in einem sogenannten ProTouring Look, d.h. Einspritzmotor, große Felgen, verbessertes Fahrwerk, Bremsen etc. Den Wagen besitze ich schon seit nunmehr 17 Jahren und habe (s.o.) einiges umgebaut, aber trotzdem H-Zulassung :-). Die ganzen Umbauten sind komplett selbst ausgeführt, selbst die Umverkabelung der Einspritzanlage. Nur den Chip habe ich progammieren & brennen lassen. Mittlerweile habe ich sogar einen eigenen Eprom-Brenner (bringt das was?). Es ist besser das aufbereitete Signal des Einspritzgerätes zu nehmen als das des Sensors. => Muss man das Signal galvanisch trennen wenn wir auf eine andere Elektronik gehen? Z.B. durch Optokoppler? Frage gerade noch parallel in Ami-Foren nach, ob jemand noch bessere Infos bzgl. des Geschwindigkeitssignals hat.
Niterider schrieb: > Es ist besser das aufbereitete Signal des Einspritzgerätes zu nehmen als > das des Sensors. => Muss man das Signal galvanisch trennen wenn wir auf > eine andere Elektronik gehen? Z.B. durch Optokoppler? > Frage gerade noch parallel in Ami-Foren nach, ob jemand noch bessere > Infos bzgl. des Geschwindigkeitssignals hat. Dazu brauchen wir alle Infos, die wir kriegen können. Egal ob für die high- oder die low-tech-Lösung.
Niterider schrieb: > Habe jetzt nachgeschaut => 60 Meilen pro Stunde (mph) (96 km/h) müssen > 1000 Umdrehungen pro Minute sein => 1 Meile sind 1000 Umdrehungen und > diese entsprechen dann den genannten 4000 Impulse pro Meile des > Steuergerätes. Mal grob angenommen, Dein Auto schafft 172 km/h. Das ergebe 1800 U/m an der Tachowelle oder 30 U/s. Ein wenig Reibungsverluste wird die Tachowelle auch noch aufweisen, weshalb ein Schrittmotor bei der Drehzahl auch noch ein wenig Drehmoment liefern muß. Weiter oben hatte ich ja einen Link auf eine Platine zur Schrittmotoransteuerung gezeigt, wo ein ATmega88 einen A4982 Schrittmotortreiber ansteuert und das Problem 'erschlagen' könnte. ABER: Dazu bräuchte man einen Stepper der mit 12VDC schon auf 30 U/s kommt. Normale Stepper (NEMA 17 z.B.) mit 1A Phasenstrom brauchen für diese Drehzahl mindestens 24V Betriebsspannung. Aus diesem Grund würde ich einen Antrieb mit Schrittmotor nicht in Erwägung ziehen. Bleibt als machbare Lösung ein kleiner 12V DC-Motor, der per PWM angesteuert und per Impulsgeber (Lochscheibe/Magnet) kontrolliert mit einem kleinen ATtiny44 auf Solldrehzahl gehalten wird. Die Geschwindigkeitsmessung würde der µC ebenfalls erledigen. Wenn Du in meiner Nachbarschaft wohnen würdest, wäre eine Umsetzung kein Problem; auf Entfernung ohne eigene Kontrolle der Schaltung ist das aber kein gangbarer Weg. Du brauchst ja eine reale und keine virtuelle Lösung ;-)
Ich denke, dass ich die Lochscheibe und Lichtschranke loswerden kann. Wenn man den Motor mit einem Gyrator (= Ersatz für große Spule) versorgt, so kann man an seinen Polen eine pulsierende Gleichspannung abgreifen, deren Pulsationsfrequenz direkt proportional zur Drehzahl ist. Dummerweise machen aber gute Motoren sechs Pulse pro Umdrehung und nicht vier. Kann man die Federkraft am Tacho verstellen? Das müsste IMHO eigentlich zum Feinabgleich möglich sein. VG Fred
m.n. schrieb: > Du brauchst ja eine reale und keine virtuelle Lösung Genau. Wir müssen uns vorstellen, dass der TE in einem in Not geratenen Raumschiff sitzt und wir ihm jetzt nur per Funkverbindung beibringen müssen, sich aus der misslichen Lage zu befreien. "Houston, we have a problem" ;)
:
Bearbeitet durch User
Fred Quinny schrieb: > Ich denke, dass ich die Lochscheibe und Lichtschranke loswerden kann. > Wenn man den Motor mit einem Gyrator (= Ersatz für große Spule) > versorgt, so kann man an seinen Polen eine pulsierende Gleichspannung > abgreifen, deren Pulsationsfrequenz direkt proportional zur Drehzahl > ist. Dann ist es doch besser, in den PWM-Pausen die EMK zu messen; das wird hinreichend genau sein. Das hatte ich mal mit einem ATtiny13 für ein 'Kindermobil' gemacht. > Dummerweise machen aber gute Motoren sechs Pulse pro Umdrehung und > nicht vier. Klugerweise nimmt man einen µC, damit man garnicht in solche Verlegenheiten kommt.
m.n. schrieb: > Dann ist es doch besser, in den PWM-Pausen die EMK zu messen; das wird > hinreichend genau sein. > Das hatte ich mal mit einem ATtiny13 für ein 'Kindermobil' gemacht. Jepp. Auch ne interessante Idee. Ich hab mich bloß im Moment in die PLL-Sache verliebt. Ich finde das sexy, mit ein paar diskreten Bauteilen eine PLL zu versuchen. Die Rettung des Havaristen steht für mich nicht an erster Stelle ;)
Fred Quinny schrieb: > Ich hab mich bloß im Moment in die PLL-Sache verliebt. Ich finde das > sexy, mit ein paar diskreten Bauteilen eine PLL zu versuchen. Die > Rettung des Havaristen steht für mich nicht an erster Stelle ;) Also eine virtuelle Lösung :-(
Hallo! Also eine Lochscheibe mit Gabellichtschranke zu bauen ist kein Problem, deshalb würde es sich nicht lohnen die Elektronik zu vermehren. Bzgl. der in einem Beitrag angesprochenen 24V => Dies kann man doch über kaufbare Elemente erreichen, oder nicht? Zwecks Wohnort => Ich komme aus dem Raum Pforzheim / Calw.
Fred Quinny schrieb: > Ich finde das > sexy, mit ein paar diskreten Bauteilen eine PLL zu versuchen. Dann nimm den Phasenvergleicher von der CD4046 PLL.
m.n. schrieb: > Also eine virtuelle Lösung :-( Im Moment noch weniger. Noch ist es ein Hirngespinst ;)
M. Klingenberg schrieb: > Also eine Lochscheibe mit Gabellichtschranke zu bauen ist kein Problem, > deshalb würde es sich nicht lohnen die Elektronik zu vermehren. Ok. Danke. Mit der Gyrator-geschichte hätte ich auch keine Chance auf 10 Bauteile mehr gehabt...
Helmut Lenzen schrieb: > Dann nimm den Phasenvergleicher von der CD4046 PLL. Oder ein XOR-Gatter. Das ist nicht das Problem. Das Problem bei solchen Chips ist dann die benötigte automotive Infrastruktur. Ich hab mir ja zum Ziel gesetzt, mit insgesamt 10 Bauteilen auszureichen. Um das zu erreichen, muss man alles im Auge behalten.
:
Bearbeitet durch User
Fred Quinny schrieb: > Oder ein XOR-Gatter. Der rastet auch auf vielfache der Frequenz ein was der andere Vergleicher in der 4046 nicht macht. Dadurch ergibt sich auch ein groesser Fang u. Ziehbereich der PLL.
:
Bearbeitet durch User
Ok. Eine PLL wird fiese Probleme aufwerfen. Ich freunde mich gerade mit der EMK-Idee an....
Fred Quinny schrieb: > Eine PLL wird fiese Probleme aufwerfen Warum? Begruende das mal. Das Impulssignal an den einen Eingang die Rueckfuehrung an den anderen. Schleifenfilter dimensioniert anhand VCO Gain, Daempungsverhalten und Eigenfrequenz. Daran ueber Verstaerker den kleinen Motor der dann als VCO wirkt.
Helmut Lenzen schrieb: > Fred Quinny schrieb: >> Eine PLL wird fiese Probleme aufwerfen > > Warum? Begruende das mal. Ich hab Angst bekommen vor dem großen Fangbereich und falschen Rastungen. Vielleicht ist die Angst letztlich unbegründet aber ich frag mich mittlerweile auch, ob eine simple EMK-Messung nicht reicht. Ein Kassettenrekorder-Motor wurde früher auch per EMK geregelt und man hätte schon kleinste Gleichlaufschwankungen sofort gehört.
Fred Quinny schrieb: > Ich hab Angst bekommen vor dem großen Fangbereich und falschen > Rastungen. Die ist unbegruendet. Du darfst halt nicht den XOR Phasenvergleicher nehmen sondern den Flankensensor. Da ist zwar der Fang und Haltebreich sehr gross aber das ist auch so gewollt. Auf Vielfache der Frequenz kann der nicht einrasten, das ist nicht moeglich. Bei PLL Frequenzvervielfacher wird nur der Flankensensitive genommen.
Angehängte Dateien:
-

pll.png
3 KB
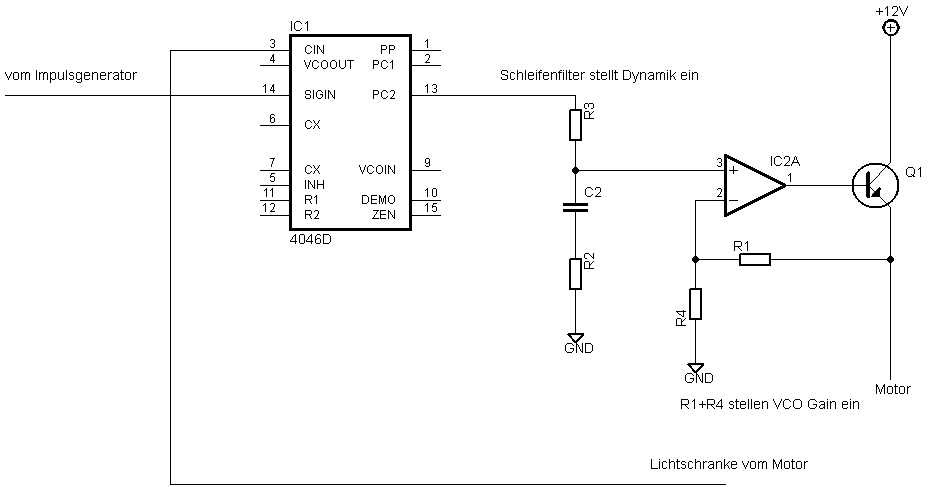
Hier mal ein Schaltungsvorschlag. (Ohne Versorgung und Lichtschranke)
Fred Quinny schrieb: > Das sieht klasse aus, Helmut! Danke! Ich kann dir nur keine Werte dranschreiben. Dazu muessten einige Angaben bekannt sein. Daempfungs des System im allgemeinen 0.7 (Optimale Daempfung) Eigenfrequenz des Systems (Duerfte bei einige Hz liegen) VCO Gain abhaengig von der Motorkennlinie und der Impulsscheibe. Die Einheit ist Hz/Volt. Also welche Frequenz erzeugt der Motor bei welcher Spannung. Der Phasenvergleichergain ist fest: VCC/(4 * Pi) Je nachdem wie der VCO Gain ausfaellt muss man den Verstaerker einstellen. Sonst kann man die Eigenfrequenz (Natural Frequency) und die Daempfung (Damping Factor) nicht vernueftig einstellen. Mir Eigenfrequenz ist jetzt nicht die Vergleichsfrequenz gemeint. Also das was der Motor an Impulsen erzeugt. Im allgemeinen dimensoniert man die Eigenfrequenz = Vergleichsfrequenz / 100
Ich denke, dass man Deine Lösung mit Schutzmaßnahmen auch auf (fast) 10 Bauteile runterbekommt. Versuch auch mal das Drumrum hinzuzeichnen. TTL-Eingang passt ja. Da sollte allerdings noch ein Schwutzwiderstand in Serie, damit die Chip-internen Schutzdioden funktionieren. 5V-Zenerdiode mit Vorwiderstand. Kondi ist entbehrlich, wenn wir aufpassen, dass die EMK die BE-Strecke nicht runiert. Vielleicht kriegen wir den Motortreiber aber noch eleganter hin. Möglichst ohne OPV. Und für die Lichtschranke noch zwei Widerstände.
:
Bearbeitet durch User
Ja... genau... wir machen keinen Sourcefolger sondern ne Source- bzw. Emitter-Schaltung. Also eine mit Verstärkung. Dann werden wir den OPV los.
:
Bearbeitet durch User
Fred Quinny schrieb: > Ich denke, dass man Deine Lösung mit Schutzmaßnahmen auch auf (fast) 10 > Bauteile runterbekommt. Dein Spass in allen Ehren aber meinst du das bringst. Das ganze Huehnerfutter kostet doch nix. Fred Quinny schrieb: > Ja... genau... wir machen keinen Sourcefolger sondern ne Source- bzw. > Emitter-Schaltung. Also eine mit Verstärkung. Dann werden wir den OPV > los. Wuerde ich nicht machen. Du belastest damit das Schleifenfilter. Mir OP hast du die moeglichkeit alles unabhaengig einzustellen. Der OP kostet nix und die 2. Haelfte kann man als Schmittrigger fuer die Lichtschranke gebrauchen. Fred Quinny schrieb: > TTL-Eingang passt ja. Da sollte allerdings noch ein Schwutzwiderstand in > Serie, damit die Chip-internen Schutzdioden funktionieren. Die 4046 PLL laesst sich mit auch mit 12 .. 15V betrieben (CMOS)
Helmut Lenzen schrieb: > Du belastest damit das Schleifenfilter. Mit den paar hundert pF eines kleinen MOSEFTs? > Die 4046 PLL laesst sich mit auch mit 12 .. 15V betrieben (CMOS) Dann kann er aber mit dem TTL-Signal nichts anfangen.
Nur damit ich das jetzt auch verstehe: du willst mit einem (Schritt-)Motor die Original-Tachowelle antreiben und die Drehzahl des Motors wird durch das Signal des Getriebes geregelt ? Schmeiss doch den Tacho bzw. dessen Inhalt raus und treib die Tachonadel mit einem Schrittmotor direkt an.
Hallo Harry, die low-tech-Lösung verwendet einen Gleichstrommotor. Und ob ein Getriebe notwendig ist, das glaub ich noch nicht. Zu dem direkten Antrieb der Nadel hatte ich schon ein eigenes Projekt als Beispiel gebracht Beitrag "Re: Ansteuerung Schrittmotor" (unten im Beitrag) VG Fred
:
Bearbeitet durch User
Harry schrieb: > Nur damit ich das jetzt auch verstehe: du willst mit einem > (Schritt-)Motor die Original-Tachowelle antreiben und die Drehzahl des > Motors wird durch das Signal des Getriebes geregelt ? > > Schmeiss doch den Tacho bzw. dessen Inhalt raus und treib die Tachonadel > mit einem Schrittmotor direkt an. Nur damit du es hetzt auch verstehst: Der Niterider wollte den Original-Tacho behalten (bzw. wieder einbauen).
Fred Quinny schrieb: > Helmut Lenzen schrieb: >> Du belastest damit das Schleifenfilter. > > Mit den paar hundert pF eines kleinen MOSEFTs? Helmut Lenzen schrieb: > Je nachdem wie der VCO Gain ausfaellt muss man den Verstaerker > einstellen. > Sonst kann man die Eigenfrequenz (Natural Frequency) und die Daempfung > (Damping Factor) nicht vernueftig einstellen. Du hast da ein Schleifenfilter, das steuert den VCO an. Und diesen VCO muessen wir einstellen koennen in seiner Kennlinie. Ist der Gain zu klein muss die Eigenfrequnz kleiner werden damit das System vernueftig einschwingt. Allerdings wird das ganze dadurch lahm wie ein Schnecke. Der OP ist da nicht drin weil ich davon soviele habe oder ich Aktien von TI besitze :-) Du machst dir dadurch das Leben unnoetig schwer. Fred Quinny schrieb: > Dann kann er aber mit dem TTL-Signal nichts anfangen. Man kann sich jetzt eine Versorgung von 5V basteln oder das Signal auf 12V bringen.
Angehängte Dateien:
-

tacho2.png
5,5 KB
So wäre dann meine Vorstellung von Helmuts Idee. Die komische Beschaltung des GND-Anschlusses ist kein Fehler sondern Absicht.
:
Bearbeitet durch User
Wie weit ist eigentlich die high-tech-Fraktion? Wie wollt Ihr dem Havaristen konkret hefen?
:
Bearbeitet durch User
high-tech wird garantiert größer, aufwändiger und teurer. Nur 12 Bauteile ist elegant. Ich hab PLLs bis jetzt nur in höherfrequenten Anwendungen mit geregelter Versorgung gehabt. Daher fallen mir zu der Spice-Schaltung noch 3 Fragen ein: Fehlt da vielleicht noch ein Kondensator für die IC-Versorgung bzw. ist die so unkritisch? Kommt der Baustein mit der variablen Phasenlage zurecht? Funktioniert das auch bei TTL-Ansteuerung (z.B. 0,5V/3V)?
Helge A. schrieb: > Fehlt da vielleicht noch ein Kondensator für die IC-Versorgung bzw. ist > die so unkritisch? Der sollte auf jedem Fall dran sein. Ist schliesslich ein Logik IC mit den gleichen Regeln wie andere auch. > Kommt der Baustein mit der variablen Phasenlage zurecht? Die PLL regelt auf 0 Grad Phasenlage aus. > Funktioniert das auch bei TTL-Ansteuerung (z.B. 0,5V/3V)? Wenn man die Versorgung auf diese Spannung auslegt. Fred Quinny hat da wieder mit der Versorgung getrickst, finde ich zwar jetzt nicht so gut muss er halt ausprobieren. Ob er ein funktionierendes 4046 Modell fuer LTSpice hat weiss ich nicht.
Angehängte Dateien:
-

DC-Motor.png
4 KB
Helge A. schrieb: > high-tech wird garantiert größer, aufwändiger und teurer. Nur 12 > Bauteile ist elegant. Stimmt, wie man sehen kann ;-)
Helmut Lenzen schrieb: > Ob er ein funktionierendes 4046 Modell fuer LTSpice hat weiss ich nicht. Ich hab Spice nur zum Schaltplanmalen benutzt. Kondensator wär ich dagegen. Die interne Z-Diode muss reichen. Wenn die Bordspannung unter deren Spannung absinkt, dann braucht man auch kein Tacho mehr sondern ne Werkstatt.
m.n. schrieb: > Helge A. schrieb: >> high-tech wird garantiert größer, aufwändiger und teurer. Nur 12 >> Bauteile ist elegant. > Stimmt, wie man sehen kann ;-) Klasse! Könnte Dich knuddeln. Ich liebe solche Wettbewerbe :)
Helge A. schrieb: > Funktioniert das auch bei TTL-Ansteuerung (z.B. 0,5V/3V)? Dann natürlich nicht. Dann müssten wir nen Pullup opfern. Aber wir kriegen ja hoffentlich noch bessere Daten.
MaWin schrieb: > Harry schrieb: > Nur damit ich das jetzt auch verstehe: du willst mit einem > (Schritt-)Motor die Original-Tachowelle antreiben und die Drehzahl des > Motors wird durch das Signal des Getriebes geregelt ? > Schmeiss doch den Tacho bzw. dessen Inhalt raus und treib die Tachonadel > mit einem Schrittmotor direkt an. > > Nur damit du es hetzt auch verstehst: Der Niterider wollte den > Original-Tacho behalten (bzw. wieder einbauen). Der Tacho ist auch dann noch original ;o) Die Schrittmotor-Zeiger-Lösung hätte auch den Vorteil, daß man (entsprechenden Controller mit an Bord) den Tacho bei bestimmten Bedingungen mit einem GPS-Geschwindigkeitssignal überlagern könnte.
:
Bearbeitet durch User
Hallo! Das mit dem Schaltplan ging ja jetzt recht schnell. Habt Ihr noch Werte für die Bauteile? Würde dann die Teile mal bestellen und mit meinem alten Elektrobaukasten mal nachbauen oder gleich löten. Für das TTL-Signal kann ich für Tests einen Sinusgenerator leihen, einen Tacho für den Motor zum Probieren finde ich bestimmt auch noch. So kann ich alles in der Werkstatt probieren und muss nicht gleich am Auto rumbauen. Wie stark darf denn der Motor sein? Bei den Ami-Foren kommen keine weitere Infos bzgl. des TTL-Signals so wie es aussieht. Den originalen Tacho möchte ich nicht ausbauen und quasi zerstören. Nicht vergessen, das Auto ist 45 Jahre alt und es muss nicht alles umgebaut sein, sollte es sich vermeiden lassen. Klar kann man einen Reprotacho kaufen, aber der ist doppelt so teuer als die ganze Schaltung.
Hallo M. Klingenberg, nun mal langsam. Helmut hatte ne gute Idee und ich hab daraus eine Sparschaltung gemacht. Wir haben noch Probleme: 1. ist Helmut damit offensichtlich noch nicht ganz einverstanden. 2. Helge hat angemerkt, dass ein knappes TTL-Signal von der Schaltung nicht richtig verarbeitet werden kann. 3. Die Inbetriebnahme der PLL geht nur mit Messungen. Wir brauchen aber in jedem Fall Daten! Wir brauchen TTL-Pegel, Impuls- und Pausenlängen und das möglichst bei Minimal- und Maximalgeschwindigkeit. Genau diese Angaben braucht auch die high-tech-Fraktion. Die musst Du jetzt messen. Erst DANN wissen wir mehr. Dann wissen wir auch, ob wir noch was am Schaltbild nachbessern müssen. BTW: Deine Bordspannung ist doch 12V, oder? VG Fred
:
Bearbeitet durch User
Hallo! Gut, hab ich begriffen. Ist auch nicht ganz einfach euch Spezalisten an jeder Stelle zu folgen. Dachte wir könnten schon zu einem Versuchsaubau übergehen. Die Teile sind ja einfach und günstig, so dass Trial and Error nicht zu kostenintensiv wäre.
Hallo M. Klingenberg, - beträgt Deine Bordspannung 12V? - hast Du Dir schon überlegt, wie Du das mit der Lochscheibe und der Lichtschranke hinbekommst? Denn sonst ist nix mit "Try & Error". VG Fred
:
Bearbeitet durch User
Angehängte Dateien:
-

vss_se2.jpg
62 KB
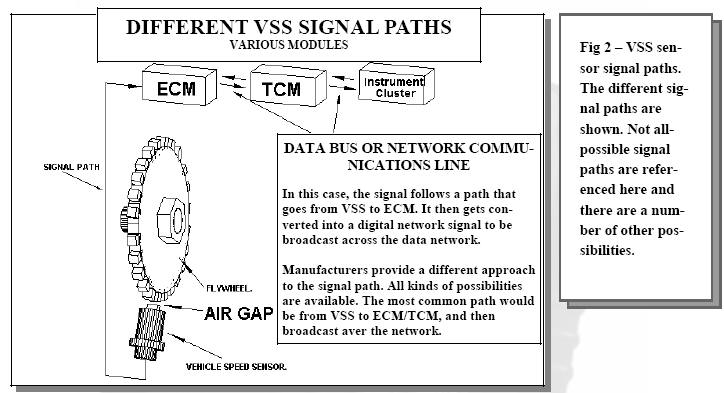
Hallo! Motor auf eine Grundplatte setzen und für die Motorwelle eine Klemmung drehen, die die Motorwelle mit der Tachowelle verbindet. An diese Klemmung wird eine Scheibe angedreht, die vier Bohrungen hat. Die Gabellichtschranke wird auf die Grundplatte montiert. Bordspannung ist 12 V Hab noch folgendes zum TTL Siganl gefunden, siehe auch Anhang. Example 2. Most GM vehicles have a VSS-ECM-Class 2 data bus path. In this arrangement, the Instrument Cluster, Radio Control head, Chime controller and Cruise Control modules get the VSS signal over the data bus. The ECM is the only module that is hard-wired to the VSS and it is the one responsible for the data bus VSS signal transmission. A no-VSS code on the instrument panel module, for example, right away points to a possible data bus or an instrument panel problem. This can be verified by simply scanning the ECM for a VSS signal while spinning the tires on a raised vehicle. If it does have an active VSS PID on the network and the other modules also see this signal over the data bus, then the instrument cluster or related circuit is at fault. By tracing the signal path we can determine if it is a data bus, wiring or a module problem.
Hallo M. Klingenberg, ich versteh überhaupt nicht, worum es da geht. Wir brauchen die Daten des VSS-Signals. Alles anderen Kommunikation scheinen Protokolle zu sein. VG Fred
Fred Quinny schrieb: > Wie gewinnst Du denn die EMK, m.n.? PB1 und PB2 sind auch Analogeingänge. In der PWM-Pause kann man die Generatorspannung des Motors als Differenzspannung messen. Man nimmt den letzten Wert, bevor das PWM-Signal wieder aktiv wird. Die notwendige Filterung macht der µC nebenbei. Fred Quinny schrieb: > Wir brauchen TTL-Pegel, Impuls- und Pausenlängen und das möglichst bei > Minimal- und Maximalgeschwindigkeit. Ein µC kommt mit einer Flanke eines Signals zu Erkennung der Frequenz völlig aus. Es ist dann egal, ob der Impuls 1µs oder 100µs aktiv ist. Abseits der ganzen Diskussion, über die elektronischen Regelmöglichkeiten, finde ich es wichtiger, einen geeigneten Motor zu finden. Leiser Lauf, hohe Drehzahldynamik und lange Lebensdauer lassen viele 'Spielzeugantriebe' von vornherein ausscheiden. Vielleicht hat Jemand dafür einen guten Tipp?
m.n. schrieb: > Leiser Lauf, hohe Drehzahldynamik und lange Lebensdauer lassen > viele 'Spielzeugantriebe' von vornherein ausscheiden. Vielleicht hat > Jemand dafür einen guten Tipp? Am besten nimmt man für sowas Glockenankermotoren. Die billigen Spielzeugmotore leben da nicht lange genug. Glockenankermotoren gibt es von Faulhaber oder Maxon
Helmut Lenzen schrieb: > Am besten nimmt man für sowas Glockenankermotoren. Ah, guter Tipp! In Billigbuchtheim gibt es die auch mit Encoder.
m.n. schrieb: > In Billigbuchtheim gibt es die auch mit Encoder. Um so besser, dann erspart er sich die Lichtschranke und kann das Teil direkt an den Tacho anflanschen.
Die Tachowelle soll zwischen 200 U/min (rund 20km/h) und 2000 U/min (rund 200 km/h) drehen, wenn ich den Anfang des Threads richtig verstanden hatte. Die untere Drehzahl ist für eine DC-Motorregelung ohne PWM schon ein Problem. Ohne PWM wäre wohl ein 5:1-Getriebe am Motor sinnvoll. Umgekehrt wäre die obere Drehzahl für einen Schrittmotor schon ein Problem. --------- Wir müssen also an der low-tech-PLL-Version noch was tun. Wir haben noch Funktionen im der CMOS-PLL ungenutzt. Ob wir damit eine PWM hinbekommen?
:
Bearbeitet durch User
Hallo! Nach einem Motor schau ich mich mal um. Soweit ich verstanden habe brauche ich: 200 bis 2000 U/min 12V Nicht zu schwach, würde lieber etwas überdimensionieren, Richtung hochwertiger Modellbaumotor, am besten gleich mit Encoder, spart die Lichtschranke. Was die Schaltung an Max.-Amp kann weiß ich ja noch nicht.
Fred Quinny schrieb: > Die untere Drehzahl ist für eine DC-Motorregelung ohne PWM schon ein > Problem. Nicht unbedingt, nimm einen Glockenankermotor die koennen auch langsam laufen. Und der Rest macht die Regelung. Und fuer das bisschen an Strom wuerde ich jetzt keine PWM einsetzen wollen. Der Tacho ist ja jetzt keine riesen Last an der Welle.
Modellbaumotore sind eher kurzlebig, Glockenanker ist hochdynamisch, kann also schnell beschleunigen und abbremsen, aber wenig robust. Gute Dauerläufer sind Ventilator und Pumpenmotore. Im Auto auch der Scheibenwischer.
Helmut Lenzen schrieb: > Fred Quinny schrieb: >> Die untere Drehzahl ist für eine DC-Motorregelung ohne PWM schon ein >> Problem. > > Nicht unbedingt, nimm.... Ich will trotzdem mal drüber nachdenken, ob die noch vielen freien Beinchen des Chips nicht zu diesem Zweck missbraucht werden können. -------- Allgemein hadere ich noch mit dem Encoder. Der braucht vermutlich nen Haufen Teile zur Anpassung.
M. Klingenberg schrieb: > Nach einem Motor schau ich mich mal um. Soweit ich verstanden habe > brauche ich: > 200 bis 2000 U/min Ich hoffe, dass Du das nicht von mir abgeschrieben hast Beitrag "Re: Ansteuerung Schrittmotor" Ich bin unsicher, ob ich das alles richtig verstanden hatte. Nicht, dass wir zwei nun voneinander abschreiben und uns so gegenseitig sicher machen und das ganze stimmt vorne und hinten nicht.... Also bitte nachprüfen. Wir kriegen schon so wenig Daten von Dir und oftmals musste mehrmals nachgefragt werden. Die TTL-Spekulationen befriedigen mich zum Beispiel überhaupt noch nicht. VG Fred
Hallo! Hab nur mal zusammengefasst, was der Motor können sollte. Die Angaben der Drehzahlen kommen ja von mir. Bzgl. des TTL-Siganls sieht es ganz düster aus, da tut sich gar nichts bei den Fachleuten in den USA => TTL, square wave 5V, 5-300ms Periodendauer, mehr kommt da nicht. Aber lt. m.n. müßte das doch reichen, wenn eh nur die Flanke abgefragt wird und dies im µs-Bereich möglich ist. Niterider
Ich brauch den Pegel, Niterider. Du sagst 5V. Hier im Thread las ich 3V. Die zuvor von mir gedachte Schaltung geht von 5V aus. Mit 3V klappt das nicht. Es ist kein Problem, wenn Du das nicht messen KANNST. Das müssen wir nur wissen. Das ist auch wichtig für Schaltungsvorschläge von uns. Denn wenn Du nicht mal ein TTL-Signal vermessen kannst, dann müssen wir einen kompletten Blindflug machen. Dann ist aber auch nichts mit "try & error", denn ohne Messungen klappt das nicht. Wie siehts denn eigentlich mit Deinen Möglichkeiten zum Brennen eines Controllers aus? Oder beschrieb mal bitte ganz allgmein, was Du Dir technisch zutraust und was nicht. VG Fred
:
Bearbeitet durch User
Hallo! Woher 3 Volt kommen weiß ich nicht, nach meinen vergangenen Suchen ist es ein 5V TTL-Signal, auch bei anderen fahrzeugen / Systemen werden 5 V erwähnt. Bzgl. brennen hab ich den Nachbau eines Willems Eprom Brenner, so was wie hier http://www.ebay.de/itm/SIVAVA-Willem-UniversalProgrammer-PCB50B-EPROM-SPI-FLASH-BIOS-ECU-PIC-Neuwertig-/161452388716?pt=Wissenschaftliche_Ger%C3%A4te&hash=item25974ff16c Niterider
Und wech Und wech schrieb: > Ich brauch den Pegel, Niterider. Du sagst 5V. Hier im Thread las ich 3V. > Die zuvor von mir gedachte Schaltung geht von 5V aus. Mit 3V klappt das > nicht. Zieht dich jetzt nicht an 3 oder 5V auf. Und so eine minimal Loesung auch nicht. Mach es so wie es aus meinem Post zu entnehmen sind. Jetzt sich um einen Kondensator rumzuklopen bringt nix. Es werden hier keine 1 Million Stueck produziert. Die PLL lassen wir mit 12V laufen und davor kommt ein Transistor derden Pegel von 5V auf 12V anhebt. Mit deiner minimal Loesung sitz er naechstes Jahr noch dran.
Hallo! Hab jetzt eine Antwort bzgl. Signal bekommen. Es wird TTL 5V, Rechteck bestätigt im Bereich von wenigen hundert Hertz. Die Suche nach einem Motor gestaltet sich doch nicht ganz so einfach, bedingt durch den Drehzahlbereich und evtl. Glockenankermotor. Diese habe ich nur bedingt gefunden und dann schon recht teuer, teilweise 150-200€ mit Getriebe (z.B. Faulhaber). Hier schau ich noch weiter.
M. Klingenberg schrieb: > Die Suche nach einem Motor gestaltet sich doch nicht ganz so einfach, > bedingt durch den Drehzahlbereich und evtl. Glockenankermotor. Diese > habe ich nur bedingt gefunden und dann schon recht teuer, teilweise > 150-200€ mit Getriebe (z.B. Faulhaber). Hier schau ich noch weiter. Im Restpostenangebot findet man z.B. diesen: http://www.pollin.de/shop/dt/OTQ0OTg2OTk-/Motoren/Gleichstrommotoren/Gleichstrommotor_JOHNSON_HC615L.html Drehzahl und Versorgungsspannung liegen im brauchbaren Rahmen. Auf Grund seiner Bauform dürfte er auch eher von langlebiger Natur sein. Für die Lochscheiben-Anbeter gibt es sogar ein 2. Wellenende. Testweise habe ich ein Bühler Motor (ähnlich 1.13.044.001) angeworfen, der bei 12V mit ca. 3200 U/m dreht. Er läuft auch bei 100 U/m noch ruhig und läßt sich gut per EMK-Messung stabilisieren. Dieser hat Kohlebürsten. Zwar sind nur 2000h Betriebsdauer angegeben, die aber bei geringer Teillast deutlich höher liegen dürfte. Dies nur als Hinweis, was man so nehmen könnte, wenn man in Restposten herumkramt. Am besten würde mir natürlich ein BLDC-Motor gefallen.
Hallo! Habe bei größeren Motoren geschaut. Ob die Leistung ausreicht? Obwohl 18W sind nicht wenig. Eine Tachowelle kan mann ja locker mit den Fingern drehen. Könnte also ausreichen. Bei knapp 3€ kann man ja auch nichts falsch machen. Mit wenigen hundert Betriebsstunden komme ich locker zurecht. Das Auto ist ein Oldtimer, wird nur 2-3 h pro Fahrt und natürlich nur im Sommer gehfahren => 2000 Betriebsstunden => bei 2 h pro Fahrt => 1000 Fahrten => Das sind Jahre so selten wie ich fahre. Pollin hat leider den IC nicht für die Schaltung, habe ich schon geschaut, muss wohl bei Conrad o.ä. bestellen, sobald ich noch mehr von den Bauteilen weiß. Hätte ich gerne zeitnah gemacht (auch mit Restrisiko), da ich mich im Winter vollends an den Einbau machen möchte. Und wech Und wech schrieb: > Wie siehts denn eigentlich mit Deinen Möglichkeiten zum Brennen eines > Controllers aus? Oder beschrieb mal bitte ganz allgmein, was Du Dir > technisch zutraust und was nicht. Da komme ich noch nicht mit => Was muss man bei der PLL-IC Lösung programmieren?
m.n. schrieb: > Zwar sind nur 2000h Betriebsdauer angegeben, die aber bei > geringer Teillast deutlich höher liegen dürfte. Passt doch gut zur Lebensdauer eines Automotors....
M. Klingenberg schrieb: > Da komme ich noch nicht mit => Was muss man bei der PLL-IC Lösung > programmieren? Gar nix. Er meint die Loesung m.n. M. Klingenberg schrieb: > Habe bei größeren Motoren geschaut. Ob die Leistung ausreicht? Obwohl > 18W sind nicht wenig. Dein Tacho verheizt kein 18W an der Welle. Der wuerde ja richtig heiss werden dabei.
Angehängte Dateien:
-

IMG_3411.JPG
3,2 MB

Hallo! Hab mal eine Skizze des mech. Aufbaus gemacht. Es ist auch ein Bild des Autos anbei, denke den ein oder anderen interessiert es. Das ist mein Hobby.
Helmut Lenzen schrieb: > m.n. schrieb: >> Zwar sind nur 2000h Betriebsdauer angegeben, die aber bei >> geringer Teillast deutlich höher liegen dürfte. > > Passt doch gut zur Lebensdauer eines Automotors.... Und das gibst Du freiwillig zu? ;-) M. Klingenberg schrieb: > Habe bei größeren Motoren geschaut. Ob die Leistung ausreicht? Obwohl > 18W sind nicht wenig. Eine Tachowelle kan mann ja locker mit den Fingern > drehen. Könnte also ausreichen. Es geht nicht um die Leistung selbst, sondern darum, dass der Motor robust gebaut ist und nicht aus dem letzten Loch pfeift. Mein Motor hat eine Nennleistungsaufnahme von ca. 25W; bei 200 U/m braucht er ca. 0,12A bei 12V: rund 1,5W! Bei voller Drehzahl sind es etwa 0,6A ohne Last (aber mit Getriebe 183:1).
Dann schraub das mal mit einem kleinen Motor so zusammen und mach ein paar Messungen. Ein paar Watt fuer den Motor sollten eigentlich reichen.
m.n. schrieb: > Und das gibst Du freiwillig zu? ;-) Ich baue keine Automotoren... Fuer einen Drehstrommotor waere das nix, der waere noch jungfraeulich ;-) m.n. schrieb: > Es geht nicht um die Leistung selbst, sondern darum, dass der Motor > robust gebaut ist und nicht aus dem letzten Loch pfeift. Und ein gutes Anlaufverhalten bei niederigen Drehzahlen hat.
Angehängte Dateien:
-

tacho2.png
5,5 KB
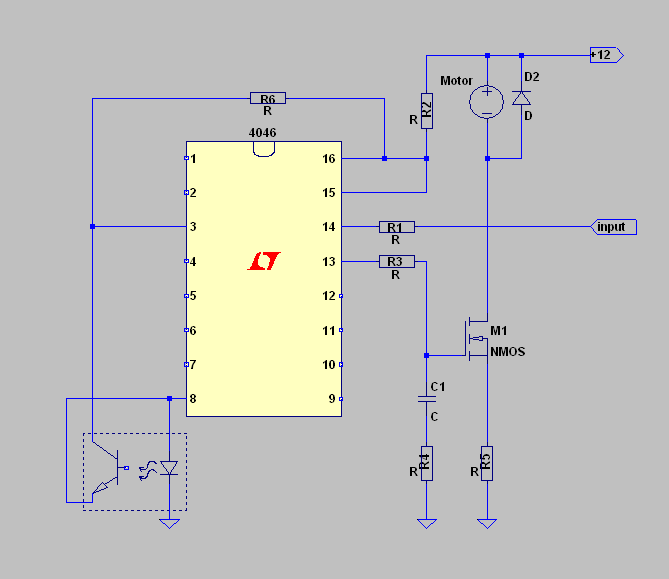
Hallo! Hab mich mal mit der Schaltung beschäftigt. Kann mir jemand auf die Sprünge helfen wie die LED der Gabellichtschranke leuchten soll? Qiunny erwähnte dies als "komische" Beschaltung des GND.
M. Klingenberg schrieb: > Hab mich mal mit der Schaltung beschäftigt. Kann mir jemand auf die > Sprünge helfen wie die LED der Gabellichtschranke leuchten soll? Qiunny > erwähnte dies als "komische" Beschaltung des GND. Ja Qiunny hat das schon eine seltsame beschaltung gemacht um sich den Vorwiderstand der LED zu sparen. Er nimmt einfach das IC selber als Vorwiderstand inc. der im IC enthaltenen Z-Diode. Vergiss das ganze einfach mal. Nimm lieber meine Schaltung wo das alles mit separaten Schaltungsteilen realisiert wird. Beitrag "Re: Ansteuerung Schrittmotor"
Angehängte Dateien:
-

dc_motor_regelung.gif
20 KB
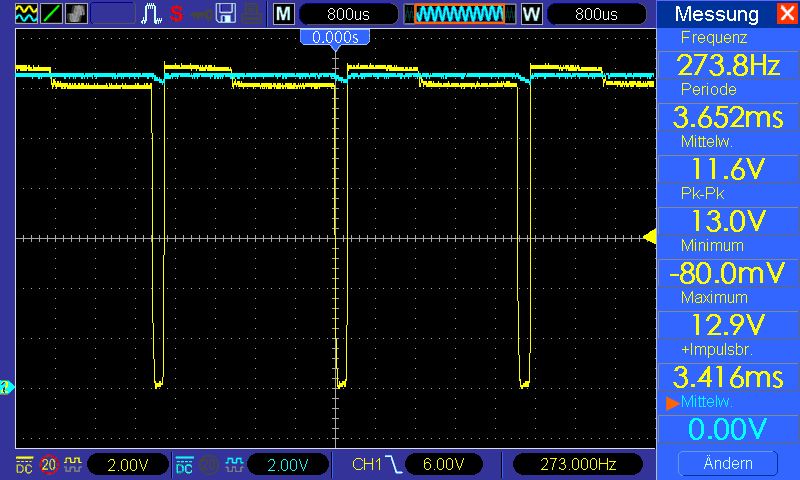
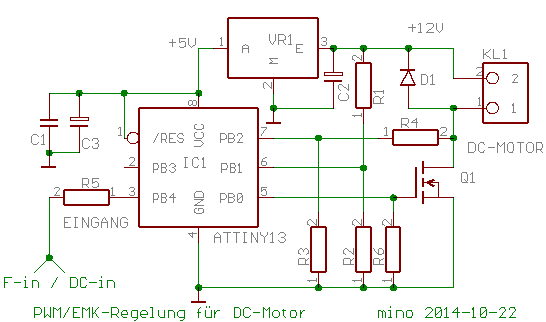
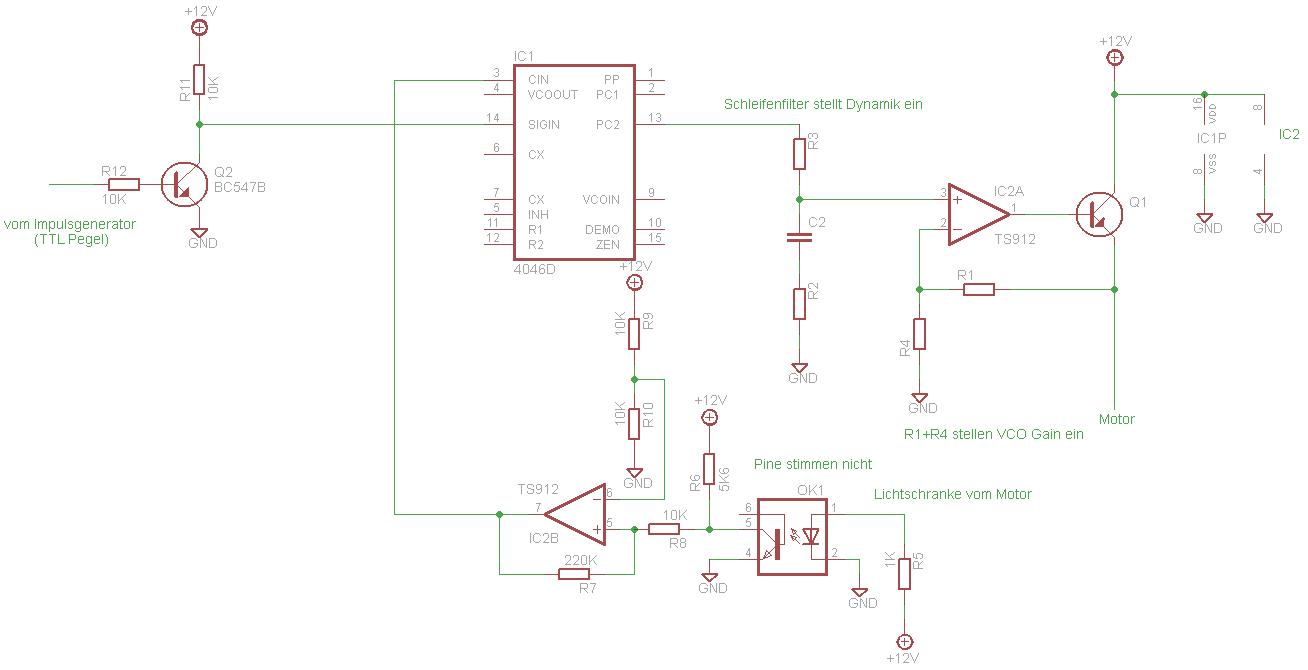
Niterider schrieb: > Habe jetzt nachgeschaut => 60 Meilen pro Stunde (mph) (96 km/h) müssen > 1000 Umdrehungen pro Minute sein => 1 Meile sind 1000 Umdrehungen und > diese entsprechen dann den genannten 4000 Impulse pro Meile des > Steuergerätes. Ich denke, ein Tacho sollte ab ca. 10 km/h eine sinnvolle Anzeige liefern; das sind dann 6 mph. Mit den gennanten Zahlen und rechnet man zudem mit Frequenzen in Hz, bekommt man die Werte: Eingangsfrequenz Fin bei 6 mph: 4000/60/10 => 6,67 Hz Tachowelle in Drehungen/s: Fin/4 => 1,67 Hz An die PLL-Fraktion: mit welchen Zeitkonstanten soll gearbeitet werden, damit die Tachonadel nicht deutlich 'flackert'? Die Lochscheibe kann man ja beliebig 'löchern', um mehr Impulse zu bekommen, aber das Steuergerät erzwingt das Arbeiten mit recht niedriger Frequenz. Die Lochscheibe hat den Vorteil, unabhängig von Motor-/Generator-Konstanten die genaue Drehzahl zu erfassen. Ein µC kann die Steuerfrequenz dagegen innerhalb einer einzigen Periode und die Generatorspannung mit PWM-Frequenz messen. Mit einer PWM-Frequenz von 250 Hz und einer PWM-Rasterung von 250 Schritten ist die µC-Regelung von Fmin auf Fmax spätestens nach 1 s eingeschwungen. Bunte Bilder sagen mehr: Die gelbe Kurve ist das Signal an Motor- und die blaue an Motor+, was der 12V-Versorgungsspannung entspricht. Man sieht die PWM-Frequenz mit 273 Hz mit der kurzen Einschaltzeit des FET gegen GND. Der anschließende Rückschlagimpuls wird durch die Diode auf ca. 12V + 0,4V begrenzt. Danach kommt die Generatorphase des Motors, woran zu erkennen ist, dass etwa 0,6V vom Motor generiert werden (Differenz zwischen blauer und gelber Linie). Gemessen wird diese ganz am Ende, bevor der PWM-Impuls wieder aktiv wird. Der Motor macht ca. 1,5 Umdrehungen/s im Versorgungsspannungsbereich von 7 - 16 V, belastet oder unbelastet. Das ist ja der Sinn der Geschichte. @PLLer Mich würden Eure Bilder interessieren ;-)
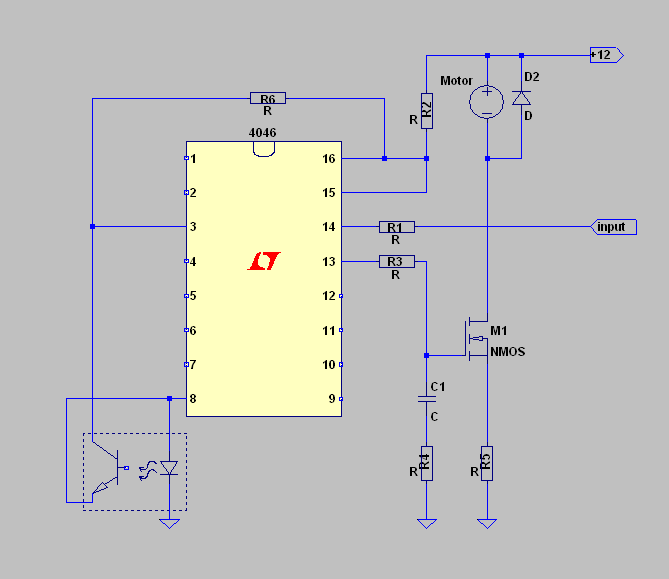
Hallo! @Helmut Lenzen Wie wird bei deiner Schaltung die Gabellichtschrabke eingebunden? Ähnlich wie bei der anderen nur die LED wird über Vorwiderstand an die 12V angeschlossen oder? Die Diode parallel zum Motor muss wohl auch sein. Für was braucht man das IC 2 (ist ein Operationsverstärker oder?) Der Transistor für die Motoransteuerung muss die Leistung des Motors aushalten.
Niterider schrieb: > Wie wird bei deiner Schaltung die Gabellichtschrabke eingebunden? > Ähnlich wie bei der anderen nur die LED wird über Vorwiderstand an die > 12V angeschlossen oder? In etwa so. Mal sollte aber mit dem 2. OP im Gehauese einen Komparor aufbauen um saubere Schaltflanken zu erhalten. > Die Diode parallel zum Motor muss wohl auch sein. Sollte man machen. > Für was braucht man das IC 2 (ist ein Operationsverstärker oder?) Der trennt das Schleifenfilter von de Endstufe und bewirkt eine Spannungsverstaerkung. Somit kann man den VCO Gain separat einstellen. Der VCO Gain ist das Verhaeltnis zwischen Motorimpulsen und Motorspannung. Hat also die Einheit Hz/V. Ist er zu klein arbeitet die Regelung nicht vernueftig. > Der Transistor für die Motoransteuerung muss die Leistung des Motors > aushalten. Yepp muss er. Aber so riesig ist der Motor ja jetzt nun auch wieder nicht.
M. Klingenberg schrieb: > Habe bei größeren Motoren geschaut. Ob die Leistung ausreicht? Obwohl > 18W sind nicht wenig. Eine Tachowelle kan mann ja locker mit den Fingern > drehen. Könnte also ausreichen. Bei knapp 3€ kann man ja auch nichts > falsch machen. Hast Du Dir mittlerweile einen Motor beschafft? Eine Möglichkeit aus dem KFZ-Bereich wäre noch ein Heckscheibenwischermotor. Ich mußte mal einen wegen eines verschmutzen Lagers auseinander schrauben. Ohne Getriebe dürfte so ein Motor bezgl. Leistung/Drehzahl auch gut passen.
Hallo! Bin gerade dabei die Teile zusammen zu stellen. Nehme einen Motor von Pollin. @Helmut Lenzen Könntest Du mir noch die Gabellichtschranke einzeichnen? Welches Bauteil brauche ich als Operationsverstärker?
Angehängte Dateien:
-

pll.png
9,5 KB
M. Klingenberg schrieb: > Könntest Du mir noch die Gabellichtschranke einzeichnen? > Gemacht. > Welches Bauteil brauche ich als Operationsverstärker? Steht im Plan.
Hallo Helmut, vielen Dank für die rasche Antwort, sehr nett!!! Denke, dass ich jetzt alles weiß, um Teile zu bestellen.
M. Klingenberg schrieb: > vielen Dank für die rasche Antwort, sehr nett!!! > Denke, dass ich jetzt alles weiß, um Teile zu bestellen. Bitte sehr. Aber denke daran das ist keine fertige Bastelanleitung mit Erfolgsgarantie. Das ist lediglich ein Schreibtischentwurf.
Hallo! @Helmut Bin nun am Zusammenlöten. Eine Frage zum Schaltplan: Was meinst Du rechts oben mit IC1 und IC2. Sind das die angedeuteten Stromversorgungen der IC's mit den PIN-Nummern? Danke für Antworten.
Klingenberg schrieb: > Sind das die angedeuteten Stromversorgungen der IC's mit den > PIN-Nummern? Ja
Klingenberg schrieb: > Sind das die angedeuteten Stromversorgungen der IC's mit den > PIN-Nummern? Wie m.n. schon sagte ja, das sind die Versorgungspins.
Hallo, Bin grad erst von eurer Steuerung gelesen. An meinem E-Jaguar hab ich leider keinen Geber. Ich müsste also von der Tachowelle erst Impulse erzeugen. Lässt sich dies auch recht einfach bewerkstelligen? Ähnlich wie bei der "Rückführung" des Signals vom DC-Motor? Am einfachsten wäre doch ein Poti mit dem mit dem ich dann den Zeigerausschlag verändern kann. Gruß Jörg
Hallo! Ein Signal zu erzeugen ist nicht ganz so schwierig. Habe bis dato an meinem Camaro einen Fahradtacho, indem ein Magnet in die hintere Felge geklebt ist und ein Sensor (Reed-Kontakt) an einem Alu-Blech das Signal abnimmt. Hab auch schon gesehen, daß Schrauben der Kardanwelle per Hall-Sensor abgefragt werden. http://www.jagsthatrun.com/ Die beschriebene Ansteuerung bin ich noch am Zusammenbauen. Ist eine Arbeit für den Winter.
Angehängte Dateien:
-

IMG_4482.JPG
320 KB

{kind=link}
Solch ein Schleppservo nimmt man dafür eigentlich. M7-G30-PK613-15 steht drauf :)
Hallo Axel, Versteh ich das richtig? In das Schleppservo kann ich mit der Tachowelle, mit Adapter rein. Der interne Motor kann dann die abgehende Welle wieder antreiben. Und einstellen lässt sich die sozusagen Übersetzung dann auch. Wenn´s das is? Wo Krieg ich´s her? Gruß Jörg
@Niterider Hattest Du denn mittlerweile die analoge Lösung erfolgreich abgeschlossen? In der Zwischenzeit hatte ich Schaltungen und Programme gemacht, mit der sich Dein Problem sehr einfach würde lösen lassen. Zum einen einen Frequenz-Spannungswandler, der jeden Impuls der Tachowelle direkt in eine proportionale Spannung wandelt: http://www.mino-elektronik.de/fmeter/fm_software.htm#bsp11 Der Frequenzbereich müßte angepaßt werden, was aber nur eine Konstante im Programm ist. Die Ausgangsspannung kann man (ggf. über ein Trimmpoti zur Feinjustierung) auf einen Drehzahlregler geben, der damit einen DC-Motor steuert: Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" Ich glaube, Du hattest Dir seinerzeit einen passenden Motor schon besorgt gehabt. sobbl schrieb: > Der interne Motor kann dann die abgehende Welle wieder antreiben. > > Und einstellen lässt sich die sozusagen Übersetzung dann auch. Das könnte auch bei Dir funktionieren.
@sobbl nicht ganz :) Du kanst an den "Sollwertgeber" ( so heissen die Dinger richtig) deinen Tachozeiger anbauen und übers Poti auslesen, wo der gerade steht. Diesen Potiwert kannst Du dann als Regelgröße verwenden, um die Position des Zeigers über den internen Motor zu manipulieren. Ist sowas, wie ein "Motorfader", nur in Rund und endlos.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.