Hallo, ich suche nach einer Möglichkeit, ein VFD-Modul (Futaba US162S) mit einem STM8S003F3 anzusteuern. Erstmal wäre ich froh, überhaupt eine Kommunikation hinzubekommen. Ein ST-Link V2 ist vorhanden und die Programmierung funktioniert generell :) Ich habe schon allgemein nach LCD-Ansteuerungen (die ja recht ähnlich sein sollten?) gesucht und mir einige Beispiele angeschaut. Die gefundenen Programmbeispiele kann man aber nicht auf mein Futaba-Display übertragen. Hier das Futaba Datenblatt: https://www.allelectronics.com/mas_assets/media/allelectronics2018/spec/VFD-162.pdf Hier die library: https://github.com/Andy4495/FutabaVFD162S Meine Idee war, mit dem VFD ein kompaktes Audio-Pegelmessgerät zu realisieren, je nach Sinnhaftigkeit und Komplexität - entweder mit analoger Peak-Gleichrichtung und analoger Logarithmierung oder aber beides per Software im STM. Im Netz sieht man viele wild flackernde Peak/VU-Meter, die hauptsächlich alles in Software erledigen und entweder viel zu schnell flackern (keine Fall-back-time) oder zu träge reagieren. Daher dachte ich mir, dass hier die analogen Stufen von Vorteil sind und Signalverarbeitung so auf jeden Fall schnell und genau genug ist. Analoge Schaltungsbeispiele für Peak/-Gleichrichtung und Logarithmierung sind ebenfalls vorhanden. Das Ganze muss nicht unbedingt Messgerätecharakter haben und der Anzeigeumfang (ca. 50dB maximal, mehr macht fast keinen Sinn bei der Größe?) muss auch nicht unbedingt riesig sein. Ich kann den STM8 Mikrocontroller nicht wirklich einschätzen, aber ich denke schon, dass er für die Umsetzung ganz gut passen müsste, oder? Kann es sein, dass das VFD-Modul mit dem N8052AH Controller eventuell zu langsam für mein Vorhaben ist? Ähnlich wie hier gezeigt, möchte ich das Display in 2x32 Balken aufteilen: https://maker.pro/arduino/projects/diy-arduino-vfd-display-20x2-vu-volume-unit-meter Wie würde denn die Grundkonfiguration des STM ungefähr aussehen, wenn ich einen Spannungspegel als Bargraph ausgeben möchte? Hat jemand etwas Ähnliches schon mal gemacht? Ich danke Euch schon einmal für Eure Hilfe, Viele Grüße, Alex
> Die gefundenen Programmbeispiele kann man aber nicht auf > mein Futaba-Display übertragen. Ja und? Du hast doch ein Datenblatt. Also lies es und bring das Display erstmal soweit ans laufen das du etwas auf der Anzeige siehst. > Kann es sein, dass das VFD-Modul mit dem N8052AH Controller eventuell zu > langsam für mein Vorhaben ist? Das musst du dir anhand des Datenblatts ausrechnen. So grob wuerde ich aber denken das es es schnell genug ist. Da steht ja sicher drin wie schnell du das takten kannst und dann schaust du mal wieviel Bytes du fuer einen fullrefresh ausgeben musst. Dann weisst du was erreichbar ist. > Wie würde denn die Grundkonfiguration des STM ungefähr aussehen, wenn > ich einen Spannungspegel als Bargraph ausgeben möchte? Du musst die Daten samplen, logarithmieren und dann darstellen. Das Problem bei sowas ist das der AD-Wandler von MCUs normalerweise nicht die noetige Aufloesung hat. Deshalb logarithmiere ich vorher analog und sample dann erst. > Hat jemand etwas Ähnliches schon mal gemacht? Ich mache sowas aehnliches mit LCDs welche ein serielles Schieberegister haben. Als MCU verwende ich einen STM32F030 pro Kanal. Damit komme ich locker auf Refreshrate von 200Hz oder mehr. Das ist nicht unbedingt notwendig, aber sieht eleganter aus. Aber 50Hz reicht auch erstmal. Das sollte dein kleiner Controller eigentlich auch schaffen. Wenn du also mit dem klarkommst dann bleib erstmal dabei. Olaf
olaf schrieb: > Ja und? Du hast doch ein Datenblatt. Also lies es und bring das Display > erstmal soweit ans laufen das du etwas auf der Anzeige siehst. Das Datenblatt ist wahrscheinlich für die Profis selbsterklärend und leicht nachzuvollziehen, ich tue mich als Hobbybastler der wenig Ahnung hat eher schwer. Aber mir hilft es oft ungemein, wenn ich mein Problem hier formuliere. Immerhin, beim Anlegen von 5V Versorgungsspannung leuchten alle Segmente auf mamximaler Helligkeit auf. Beim Testweise-Verbinden eines der Datenpins mit dem CTS oder dem RXD-Pin eines MAX232 (am PC-USB angeschlossen) zeigt es auch alle möglichen Schriftzeichen an. Ok, also den Analogteil lasse ich dann erstmal außen vor. In Software bleibt dann noch der Teil des Samplings/ und ggf. Hold (Spannung erfassen/ halten und ausgeben, richtig?) und der Segment-Ausgabe als "user defined chararacter" (in meinem Fall je Segment ein Block aus 2x7 Pixeln). Als Datenleitungen habe ich ja nur Clock, Data und Reset. Wie nennt man diese Schnittstelle eigentlich? Clock, Data und Reset sind ja jeweils nur Eingänge, oder? Um das Display zu betreiben, brauche ich einen Clock-Pulse von 2us-high/2us-low Pulse-Länge + 40us Gesamtdauer. Das Diagramm mit dem Clock-pulse verstehe ich nicht wirklich. Warum schreibt man nicht einfach einen gleichmäßigen Clock-Takt vor und warum variiert man diesen bzw. was bedeutet der gestrichelte Bereich im Clock-Takt? Falls es möglich ist, und es keinen großen Aufwand bedeutet - kann evtl. jemand ein Programmcode-Beispiel für die Ausgabe des Buchstabens "A" machen? Grüße, Alex
> Als Datenleitungen habe ich ja nur Clock, Data und Reset. Wie nennt man > diese Schnittstelle eigentlich? Syncrone serielle Schnittstelle. Oder auch SPI. Ist aber nicht so gernormt wie andere Schnittstellen. Es gibt da unterschiedliche Modi. http://elm-chan.org/docs/spi_e.html Olaf
STM8, soso. Ich poste dir mal eine Routine, die per Bitbanging 8 bit per SPI auf ein DOGM Display schiebt. Das ist AVR8, sollte aber so gut wie auf jedem MC laufen:
1 | // LCD connections
|
2 | #define LCD_PORT PORTB
|
3 | #define LCD_DIR DDRB
|
4 | #define LCDDATA 1
|
5 | #define LCDCLK 2
|
6 | #define LCDA0 3
|
7 | #define LCDCS 0
|
8 | #define LCD_MASK ((1<<LCDDATA)|(1<<LCDCLK)|(1<<LCDA0)|(1<<LCDCS))
|
9 | |
10 | // LCD routines by bit banging as we have no more pins to use the hardware SPI
|
11 | void lcd_out(const uint8_t data) { |
12 | uint8_t n = 8; |
13 | uint8_t shifter = data; |
14 | LCD_PORT &= ~(1<<LCDCS); // select LCD |
15 | while (n>0) { |
16 | LCD_PORT &= ~(1<<LCDCLK); // clk lo |
17 | if (shifter & 0x80) LCD_PORT |= (1<<LCDDATA); |
18 | else LCD_PORT &= ~(1<<LCDDATA); |
19 | shifter <<= 1; |
20 | LCD_PORT |= (1<<LCDCLK); // clk high |
21 | n--; |
22 | }
|
23 | LCD_PORT |= (1<<LCDCS); // deselect LCD |
24 | }
|
Nur eine von dutzenden Möglichkeiten. Da kannste auch eine for-next Schleife oder was auch immer benutzen.
:
Bearbeitet durch User
olaf schrieb: > Syncrone serielle Schnittstelle. Oder auch SPI. Ist aber nicht so > gernormt wie andere Schnittstellen. Es gibt da unterschiedliche Modi. Genau. Das hier ist SPI-Mode1. Allerdings nicht "pure". Die Wartezeit von einem halben Takt ist nicht direkt SPI-like. Allerdings: viele reale SPI-Hardware hat sowieso eine Art Zwangspause von einer Bitdauer nach jeden Datenwort. Inwieweit das auch auf den STM8 zutrifft entzieht sich allerdings meiner Kenntnis. Das soll der TO selber aus dem Datenblatt ermitteln. Ist sein Projekt und er selber hat sich aus unerfindlichen Gründen für STM8 entschieden...
c-hater schrieb: > Ist sein Projekt > und er selber hat sich aus unerfindlichen Gründen für STM8 > entschieden... Naja, vielleicht hat er noch ne Tüte davon in seiner Bastelkiste und will sie nicht ganz und gar sedimentieren lassen. Geht mir gelegentlich ähnlich, zwar nicht mit STM8, aber vom Prinzip her. Und zum TO: Du willst etwas ausprobieren, hast auch die Dokumentation, suchst aber nach etwas Fertigem zum Kopieren anstatt die Doku zu lesen und zu verstehen und etwas dabei zu lernen. Hmm... W.S.
Vielen Dank für die Beispiel Routine, Matthias! Zum Einstieg in die Theorie zum bit banging vs. hardware SPI hab ich einiges gefunden. Ich könnte mir vorstellen, dass es eigentlich genauer und schneller wäre, das SPI in hardware zu machen (jitter), aber inwieweit das wirklich relevant ist. Das wäre dann was für später, wenn alles läuft. Auf dieser Seite wird das Betreiben eines LCDs mit dem STM8 sehr ausführlich beschrieben. https://embedded-lab.com/blog/continuing-stm8-microcontroller-expedition/14/ Kann ich mir hier vielleicht etwas abschauen? Ich bin wie gesagt Hobby-Bastler ohne längere Erfahrungen mit Mikrocontrollern. Beim definieren der GPIOs gehts schon los... Was ist denn der GPIOD? (#define LCD_PORT GPIOD) Die anderen Pins kann ich zuordnen und ich bin gerade dabei, das Ganze auf meinen Testaufbau zu übertragen. W.S. schrieb: > willst etwas ausprobieren, hast auch die Dokumentation, suchst aber > nach etwas Fertigem zum Kopieren anstatt die Doku zu lesen Ich glaube es geht dem ein oder anderen Anfänger ähnlich - wenn man ein Beispiel vor sich hat, geht es manchmal besser voran als mit nem leeren Blatt Papier.
Alex schrieb: > Beim definieren der GPIOs gehts schon los... Was ist denn der GPIOD? > (#define LCD_PORT GPIOD) Huhu Das ist (vermutlich) der Port D des Controllers. Ich war jetzt zu faul selber mal im Includefile nachzusehen ob da evtl was extra definiert wurde. Aber, ohne Dir zunahe treten zu wollen, bist Du sicher dass es Sinn macht so ein Projekt zu starten wenn Du nicht mal rauskriegst was GPIOD ist? Da fehlen vielleicht doch ein paar Grundlagen? /regards
Andreas H. schrieb: > Da fehlen vielleicht doch ein paar Grundlagen? Da kann man aber entgegenhalten, das man an der Aufgabe wächst. Alex schrieb: > Ich könnte mir vorstellen, dass es eigentlich genauer > und schneller wäre, das SPI in hardware zu machen (jitter) Kannste knicken. Erstens ist Jitter bei einem VFD Chip wurscht und zweitens ist ja das CLK von SPI genau zur Synchronisation. Bitbanging geht halt auf jedem MC, zu Hardware SPI musst du genau das Datenblatt studieren.
:
Bearbeitet durch User
> Ich glaube es geht dem ein oder anderen Anfänger ähnlich -
WAs dir und anderen Anfaengern fehlt ist nicht das Internet und damit
die Moeglichkeit bestimmtes Detailwissen einzusehen oder andere Arbeiten
abzugreifen. Du brauchst ein Buch das dich komplett an die Hand nimmt
und dir das Wissen didaktisch aufbereitet in sinnvoller Reihenfolge und
aufbauend beibringt. Alles andere ist zum Scheitern verurteilt.
Olaf
olaf schrieb: > Du brauchst ein Buch das dich komplett an die Hand nimmt Ähem... an die Hand? Es wäre mMn wesentlich sinnvoller, das Buch ZU LESEN. Und zwar um es zu verstehen. W.S.
> Ähem... an die Hand?
Wenn du schon so wenig Gehirnzellen fuer Freundlichkeit bereitstellen
willst, warum nicht ein paar fuer das Verstaendnis von Metaphern opfern?
Olaf
Hallo, Was die GPIOs und Ports sind (Port A,B,C und D) und wo sich diese bei meinem Aufbau hardwaremässig befinden (D4/5/6 = Pin 1/2/3 am STM8 im TSSOP20) habe ich klären können:) Auch hab ich meine beiden "custom characters" für die Balkenanzeige in Binärschreibweise aufschreiben können:) Zu den Abkürzungen hier: STB = stop bit = Reset SCK = Clock SDI = Data - das müsste passen? Hier nochmal der LCD-Code auf den ich mich beziehe: https://embedded-lab.com/blog/continuing-stm8-microcontroller-expedition/14/ #include "stm8s.h" #define LCD_PORT GPIOD #define LCD_STB_pin GPIO_PIN_4 #define LCD_SCK_pin GPIO_PIN_5 #define LCD_SDI_pin GPIO_PIN_6 ich habe mir vorhin auch mal alle Kommandos des VFDs in die "0x00"-Hexadezimalschreibweise übersetzt. Dabei ist mir aufgefallen, dass die Kommandos vom LCD fast überhaupt nicht mit denen der VFDs übereinstimmen. Wahrscheinlich kann ich dann vieles weglassen, oder? Dieser Teil wird so übernommen, oder? #define LCD_STB_HIGH() GPIO_WriteHigh(LCD_PORT, LCD_STB_pin) #define LCD_STB_LOW() GPIO_WriteLow(LCD_PORT, LCD_STB_pin) #define LCD_SCK_HIGH() GPIO_WriteHigh(LCD_PORT, LCD_SCK_pin) #define LCD_SCK_LOW() GPIO_WriteLow(LCD_PORT, LCD_SCK_pin) #define LCD_SDI_HIGH() GPIO_WriteHigh(LCD_PORT, LCD_SDI_pin) #define LCD_SDI_LOW() GPIO_WriteLow(LCD_PORT, LCD_SDI_pin) Von hier an stimmt, so wie ich das sehe, nur "clear display" (VFD-Kommando Nr. 1 > 01H > 0x01) überein. Ansonsten kann ich nichts vom LCD-Code übernehmen, richtig? #define clear_display 0x01 #define goto_home 0x02 #define cursor_direction_inc (0x04 | 0x02) #define cursor_direction_dec (0x04 | 0x00) #define display_shift (0x04 | 0x01) #define display_no_shift (0x04 | 0x00) #define display_on (0x08 | 0x04) #define display_off (0x08 | 0x02) #define cursor_on (0x08 | 0x02) #define cursor_off (0x08 | 0x00) #define blink_on (0x08 | 0x01) #define blink_off (0x08 | 0x00) #define _8_pin_interface (0x20 | 0x10) #define _4_pin_interface (0x20 | 0x00) #define _2_row_display (0x20 | 0x08) #define _1_row_display (0x20 | 0x00) #define _5x10_dots (0x20 | 0x40) #define _5x7_dots (0x20 | 0x00) #define dly 2 #define DAT 1 #define CMD 0 extern unsigned char data_value; void SIPO(void); void LCD_init(void); void LCD_toggle_EN(void); void LCD_send(unsigned char value, unsigned char mode); void LCD_4bit_send(unsigned char lcd_data); void LCD_putstr(char *lcd_string); void LCD_putchar(char char_data); void LCD_clear_home(void); void LCD_goto(unsigned char x_pos, unsigned char y_pos); Wie starte ich eigentlich das "Programm" auf dem STM8? Kann man das per Knopfdruck und zusätzlichem Code machen, oder läuft das einfach los, wenn eine Versorgungsspannung anliegt? Danke für Eure Hilfe bisher, aber ich sehe schon, man muss sich wirklich selbst da durchwühlen. Trotzdem wäre es ganz ohne Unterstützung noch schwerer. Viele Grüße, Alex
Alex schrieb: > oder läuft das einfach los, > wenn eine Versorgungsspannung anliegt? Das wäre der Normalfall. Aber wir wissen ja nix von deiner Hardware - ausser, das da ein VFD an irgendein MC Board mit STM8 angeschlossen sein soll. Zur Bedienung des MC Boards solltest du die Unterlagen dazu konsultieren. Alex schrieb: > aber ich sehe schon, man muss sich wirklich > selbst da durchwühlen. Sicher wäre es einfacher, wenn du dich nicht ausgerchnet mit so einer selteneren MC Familie wie STM8 beschäftgien würdest. Da gibts hier nicht so viele Kenner. Ich z.B. weiss nur, das die Dinger gerne mal in chinesischen Standheizungen arbeiten.
:
Bearbeitet durch User
Matthias S. schrieb: > Alex schrieb: >> oder läuft das einfa Pullupwiderstand 10k am Ach los, >> wenn eine Versorgungsspannung anliegt? > > Das wäre der Normalfall. Aber wir wissen ja nix von deiner Hardware - Es braucht: - Pullupwiderstand am Anschluß NRST - Kondensator 1 uF gegen Ground am Anschluß VCAP - Abblockkondensator 100 nF über der Betriebsspannung nahe an den Anschlüssen des Controllers Danach legt das Teil mit anlegen der Betriebsspannung automatisch los. Ein (kurzes) anlegen eines LOW-Pegels am NRST setzt den Controller zurück (Reset eben). Allerdings: Alex schrieb: > Ein ST-Link V2 ist vorhanden und die > Programmierung funktioniert generell :) Wenn man den anschließen kann, sollte man auch wissen, wie der Controller "startet"
Angehängte Dateien:
-

STM8_schaltplan.png
12 KB -

STM8_schaltplan.png
12 KB

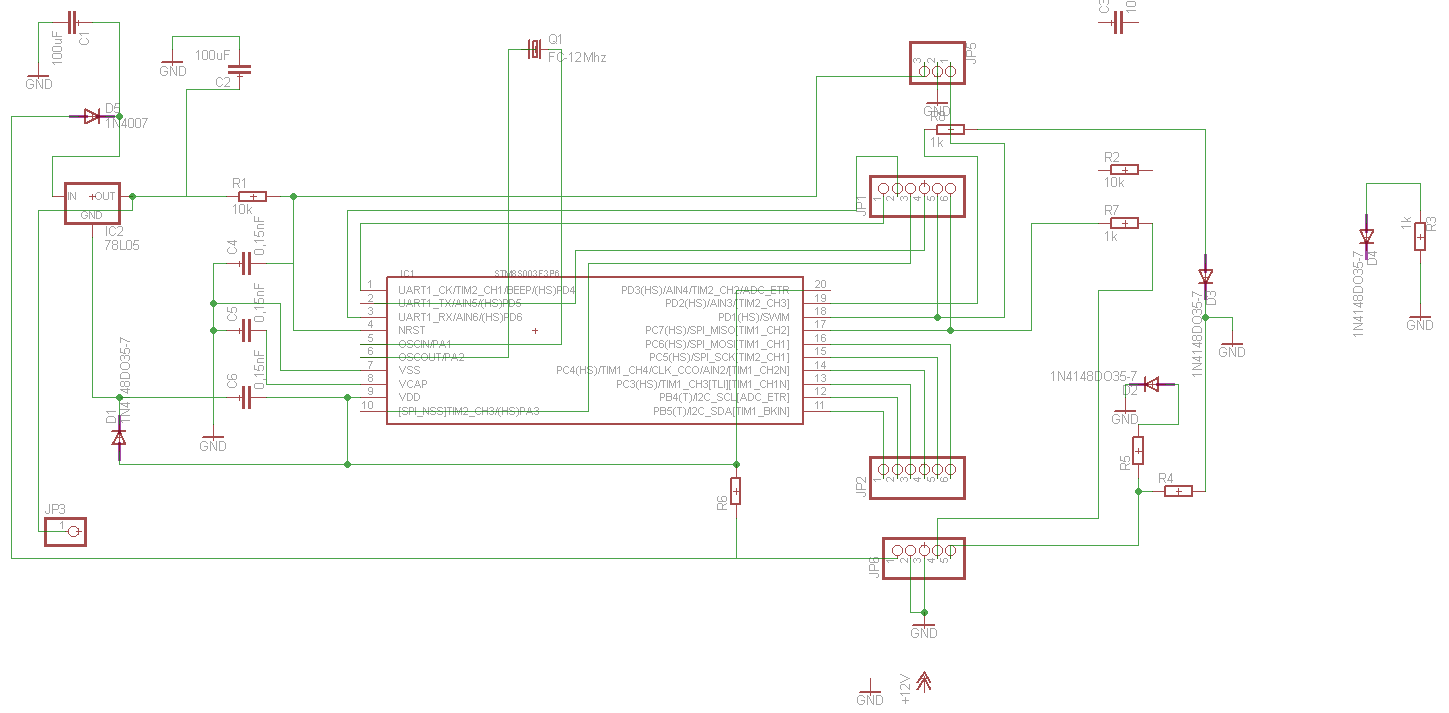
jjflash schrieb: >> Ein ST-Link V2 ist vorhanden und die >> Programmierung funktioniert generell :) > > Wenn man den anschließen kann, sollte man auch wissen, wie der > Controller "startet" Es ist Zufall, dass ich den STM8 nutzen will. Hatte noch einen RPM-Meter mit STM8 übrig, dessen Displaypins ich durch zwei Stiftleisten ersetzt habe - als quasi Entwicklungsboard :) SWIM und NRST waren auch schon herausgeführt, man musste nur noch eine Stiftleiste anlöten. Der 10k von NRST an Vcc, der Abblock-C und der Kondensator an Vcap ist schon drauf. Hänge den groben Schaltplan mal an (Displaypins= JP1/JP2, Hallsensor am Kabel ist nicht mit drauf). Der STM8 wird ja allgemein eher gelobt, daher dachte ich, dass ich den nutzen kann. Hätte ich die freie Wahl gehabt, hätte ich zB. auch eher einen PIC -Mikrocontroller gewählt, aber wirklich besser wäre der dann auch nicht, oder? Inwiefern sind eigentlich die Programme der verschiedenen Controller später untereinander kompatibel, bzw. kommt es nur auf die Programmiersprache oder eher auf die Eigenarten der Controller an (Beispiel STM/PIC)?
Alex schrieb: > Dieser Teil wird so übernommen, oder? > #define LCD_STB_HIGH() GPIO_WriteHigh(LCD_PORT, LCD_STB_pin) > #define LCD_STB_LOW() GPIO_WriteLow(LCD_PORT, LCD_STB_pin) > ... usw. Ich frag mich seit langem, wieso die Leute hier sowas hinschreiben. Es ist wohl doch die Hochmut-Kuh, die da zugebissen hat. Oder eben eine unsägliche Angst davor,_selber_ auf die bekannten Register des Chips zuzugreifen. Bedenke mal, daß du mit deinen Zeilen zwar eine Textersetzung vorgenommen hast, aber anstatt das Portpin zu setzen eine Bibliotheksfunktion aufrufst, die dann auch noch 2 Argumente benötigt, die ihrerseits von Anfang an bereits feststehen. Also 2 Werte laden und auf den Stack oder in Register schaufeln, die Funktion aufrufen und die muß dann die Argumente bewerten, um auf den gewünschten Port zu kommen und dort das gewünschte Pin zu setzen. Und das für die Verwendung INNERHALB eines Lowlevel-Treibers, der ohnehin plattform- und projektabhängig ist. Viel Umweg für wenig Nutzen. Wieviel einfacher und auch geradliniger ist es, etwa sowas zu schreiben:
1 | #define StrobePin 6
|
2 | |
3 | void Strobe_low (void) |
4 | { GPIOD_BRR = 1<<StrobePin; } |
5 | |
6 | void Strobe_high (void) |
7 | { GPIOD_BSRR = 1<<StrobePin; } |
8 | |
9 | ... usw. |
Ich habe hier mit BRR und BSRR etwas aus der Cortex-Kiste bzw. STM32 entnommen. Das müßtest du an deinen Chip anpassen. Und dann kannst du als allerersten Schritt diese Funktionen ausprobieren, ob sie auch das tun, was du haben willst. Als nächstes könntest du ein 'inline' dazuschreiben und damit auch den Call beseitigen. Du programmierst hier einen µC, wo man es direkt mit den auf dem Chip vorhandenen Hardware-Teilen zu tun hat - und nicht für einen PC, wo es ein OS gibt, das Hardwarezugriffe nicht zuläßt, weswegen man dort nur das benutzen kann, was das vom OS gebotene API hergibt. W.S.
Alex schrieb: > Inwiefern sind eigentlich die Programme der verschiedenen Controller > später untereinander kompatibel, bzw. kommt es nur auf die > Programmiersprache oder eher auf die Eigenarten der Controller an > (Beispiel STM/PIC)? Also, ich versuche mal, eine klaffende Grundlagenlücke bei dir etwas zu verkleinern. Verschiedene Architekturen sind eben verschieden aufgebaut und haben auch verschiedene Sätze von Maschinenbefehlen, die eben zur jeweiligen Architektur passen. Ganz grob kann man Architekturen in 2 Gruppen teilen: Harvard-Architektur, wo es für Instruktionen und Daten getrennte Adreßräume gibt VonNeumann-Architektur, wo es nur einen gemeinsamen Adreßraum für Instruktione und Daten gibt. Darüber hinaus gibt es von der Verarbeitung der Daten her zwei verschiedene Ansätze: 1. Sorte: Mit einer CPU, die Register für die Daten hat, wo man zum Bearbeiten eine Folge von Schritten tun muß: - Laden der Daten vom RAM ins Register - Bearbeiten des Registers - Speichern der Daten vom Register in den RAM 2. Sorte: Mit einer CPU, die eben keine Register für die Daten hat, wo also das Ergebnis quasi direkt im RAM erzeugt wird. Das braucht dann nur einen Maschinenbefehl dafür. Es haben beide Ansätze ihre Vor- und Nachteile und man trifft auch beide als Chips an. Die PIC16 sind z.B. Harvard und von de CPU her von der 2.Sorte. Die PIC32 sind hingegen das komplette Gegenteil. So, das war ein bissel zu den Hardwaregrundlagen. Programmierung: Man unterscheidet seit langem 2 Sorten von Programmiersprachen: maschinenabhängige und maschinenunabhängige. Von der ersteren Sorte ist eigentlich nur Assembler übriggeblieben. Da ist eigentlich nur jedem Maschinenbefehl ein möglichst gut zu merkender Name (wird hier oft Mnemonik genannt) zugeordnet. Also anstelle 0C3h 57h 0E0h lieber sowas JMP Kaltstart Bei den maschinenunabhängigen Sprachen bedarf es eines Übersetzungsprogrammes (zumeist Compiler genannt), das für die jeweiligen Sprachelemente der jeweiligen Sprache eine Folge von Maschinenbefehlen für die Maschine macht, wo das Programm dann mal laufen soll. Da die Sprache aber maschinenunabhängig sein soll, kann sie keine Spezialitäten einer bestimmten Maschine berücksichtigen. Dafür gewinnt man aber an Portabilität, wenn man sauber zwischen den eigentlichen Algorithmen und den Lowlevel-Treibern trennt. Zum Portieren braucht man dann nur noch die Lowlevel-Dinge an eine andere Maschine anzupassen - vorausgesetzt, das ganze Zeugs ist generell überhaupt portierbar. W.S.
Alex schrieb: > Inwiefern sind eigentlich die Programme der verschiedenen Controller > später untereinander kompatibel In C kann man recht gut die hardwarenahen Zugriffe vom funktionalen Code trennen und hat damit den Großteil des Codes auf andere CPUs portierbar. Speziell beim AVR-GCC recht praktisch ist die "delay.h", mit der man die ganzen µs-Zeiten lt. Datenblatt des VFD bequem implementieren kann. Leider ist eine ähnliche Library für viele andere Architekturen nicht verfügbar. Die PIC kann man nicht alle in einen Topf werfen, da sie recht krasse Unterschiede aufweisen. Eigentlich sind erst die PIC18 und höher auch gut in C programmierbar. Die kleineren haben z.B. einen sehr reduzierten Befehlssatz, limitierten Hardwarestack, lückende RAM-Bereiche und segmentierten Flash als Nachteile. Mit dem STM8 hab ich keine Erfahrungen. Das VFD hat schon ein recht eigenartiges Protokoll mit 2 Modi. Mode 1 sieht einfacher aus und läßt sich mit dem HW-SPI realisieren. Mode 2 könnte aber fehlertoleranter sein (Resynchronissation nach Störimpulsen).
Matthias S. schrieb: > Sicher wäre es einfacher, wenn du dich nicht ausgerchnet mit so einer > selteneren MC Familie wie STM8 beschäftgien würdest. Da gibts hier nicht > so viele Kenner. Ich bin mittlerweile auch zur Einsicht gekommen, dass ich definitiv einen PIC nehmen muss. Als Anfänger gibt es einfach zu viele Baustellen. Aber auch bei den PICs finde ich relativ wenige Beispielcodes im Netz. Zu meinem speziellen Thema SPI/"3 wire"- VFD existiert sehr wenig. Falls jemand noch Seiten zu VFD-Projekten oder Infos hat, wo man sich vielleicht was abschauen könnte - dann gerne hier posten.:) Man kann anhand einem funktionierendem Projekt mit ungefährer Anleitung eher zu einem Ergebnis kommen, auch wenn der Lerneffekt wahrscheinlich nicht besonders groß ist. Erstmal soll ja nur die Verbindung zwischen PIC und VFD laufen und wenigstens ein paar im Programm gesetzte Zeichen aufleuchten. Das wäre dann schon ein richtiger Erfolg :) Zumindest weiß ich jetzt, was Ports sind und kann Hex/Binärschreibweise übersetzen. Was empfehlt ihr? Spricht etwas dagegen, einen eher "alten" PIC aus der Zeit des Displays zu nehmen (Mitte der 90er)? Der beliebteste PIC ist angeblich der PIC16F54 und der PIC16F84 oder der PIC16F886/7. Programmieren würde ich den mit dem TL866 Programmer. Viele Grüße und vielen Dank für die ganzen wertvollen Infos! Alex
Ob du eine STM8/PIC/AVR verwendest, ist eigentlich egal. Viel wichtiger ist die Verfügbarkeit von einer state-of-the-art Umgebung. Normalerweise benutzt man dazu die zum Controller gehörige IDE (weil meist umsonst) in Verbindung mit einem Debugger, welcher in-system wirkt. Umstecksessions mit TL866 hören sich so 90er an. Zudem ist es hilfreich, wenn die IDE einen Simulator mitbringt. Da kannst du trocken ein paar Codezeilen testen ohne den Flash abzutragen. Debugger kosten Geld. Für kleines Geld einen stlink-clone von aliexpress und beim STM8 geht es vorwärts. PIC/AVR mittels SNAP für topaktuell oder Pickit 3 von ali für die etwas älteren PICs. Werkel selbst gerade an einer dualen Umsetzung. Von AVR um STM8 erweitert. Der STM gewinnt unter SDCC knapp bei der Binärgröße. Und ob ein Pin nun mittels "PORTB |= (1 << PB3)" oder "GPIOB->ODR |= (1 << 3)" angesteuert wird, ist für den Grundalgorithmus eigentlich egal. Und lass die Finger von den alten 16F54. Damit beschränkst du dich selbst, wo du nicht musst.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.