Habe eine schrittmotor der eine antenne dreht. Soll die antenne in die gewünschte richtung drehen, AZ in grad. Das teil kennt den anfangszustand nicht, kann irgendwo stehen. Ich muss also zuerstmal einen nullpunkt finden. Eine lösung wäre ein mechanischer anschalg. Der motor dreht dann beim einschalten eine runde rechts bis er am anschlag hängen bleibt. Oder ich verwende lichtschranke oder hallsensor. Dann weiss ich wo null ist. Ich brauche aber eine strategie damit das antennenkabel nicht aufgewickelt wird. Wie mach isch das?
Sebastion B. schrieb: > Oder ich verwende lichtschranke oder hallsensor. Dann weiss ich wo null > ist. (Absolut) Inkrmentalgeber. Das geht auch mit einem Poti.
Sebastion B. schrieb: > Wie mach isch das? Egal, Anschlag spart Lichtschranke und deren Verkabelung.
Sebastion B. schrieb: > Oder ich verwende lichtschranke oder hallsensor. Dann weiss ich wo null > ist. Ich brauche aber eine strategie damit das antennenkabel nicht > aufgewickelt wird. Wie mach isch das? Die einfachste Lösung ist ein Absolutencoder. Ein Schrittmotor, der gegen einen Anschlag läuft, hört sich nicht schön an, es sei denn, du hast eine vernünftige Stall-Erkennung. Normalerweise brauchst du auch deutlich mehr als 360° Drehwinkel, damit die Antenne nicht dauern 360°-Läufe machen muss und du nicht an den Enden Probleme bekommst. Für einen Sensor brauchst du dann aber eine Untersetzung, damit die z.B. 540° Drehbereich eindeutig abbildbar sind. Wie genau soll es denn sein? Sitzt da eine 3m-Schüssel für 24GHz drauf oder eher eine 4-El Yagi? ;-)
Wenn eine Unterbrechung des Kabels okay ist: Schleifringe. Die Positionierung kannst du mit einem geschickt platzierten Mikroschalter mit Rollenhebel machen. Beim Drüberfahren wird der Rollenhebel nach unten gedrückt, aber das Drehen wird nicht blockiert. Ansonsten musst du dir einen Wickelmechanismus überlegen, der das Kabel aufwickelt. So ähnlich wie bei einem Staubsauger.
Sebastion B. schrieb: > Ich brauche aber eine strategie damit das antennenkabel nicht > aufgewickelt wird Das kann doch garnicht passieren, wenn der Motor immer rechtsrum gegen den Anschlag fährt und von da an nur nach links bis 360 Grad. Ob Anschlag oder Microswitch oder Lichtschranke ist für die Initialisierungsstrategie egal. Das Stoppen muss aber zuverlässig funktionieren, möglichst auch im Fehlerfall. Abfrage per Software kann auch schiefgehen, nicht jeder schreibt immer nur vollkommen fehlerfreie Programme, auch wenn das hier jeder von sich behauptet. Ich verwende möglichst 2 Endschalter die den Motorstrom in der betreffenden Richtung unterbrechen. Georg
Angehängte Dateien:
-

IMG_20220506_155426_1.jpg
300 KB
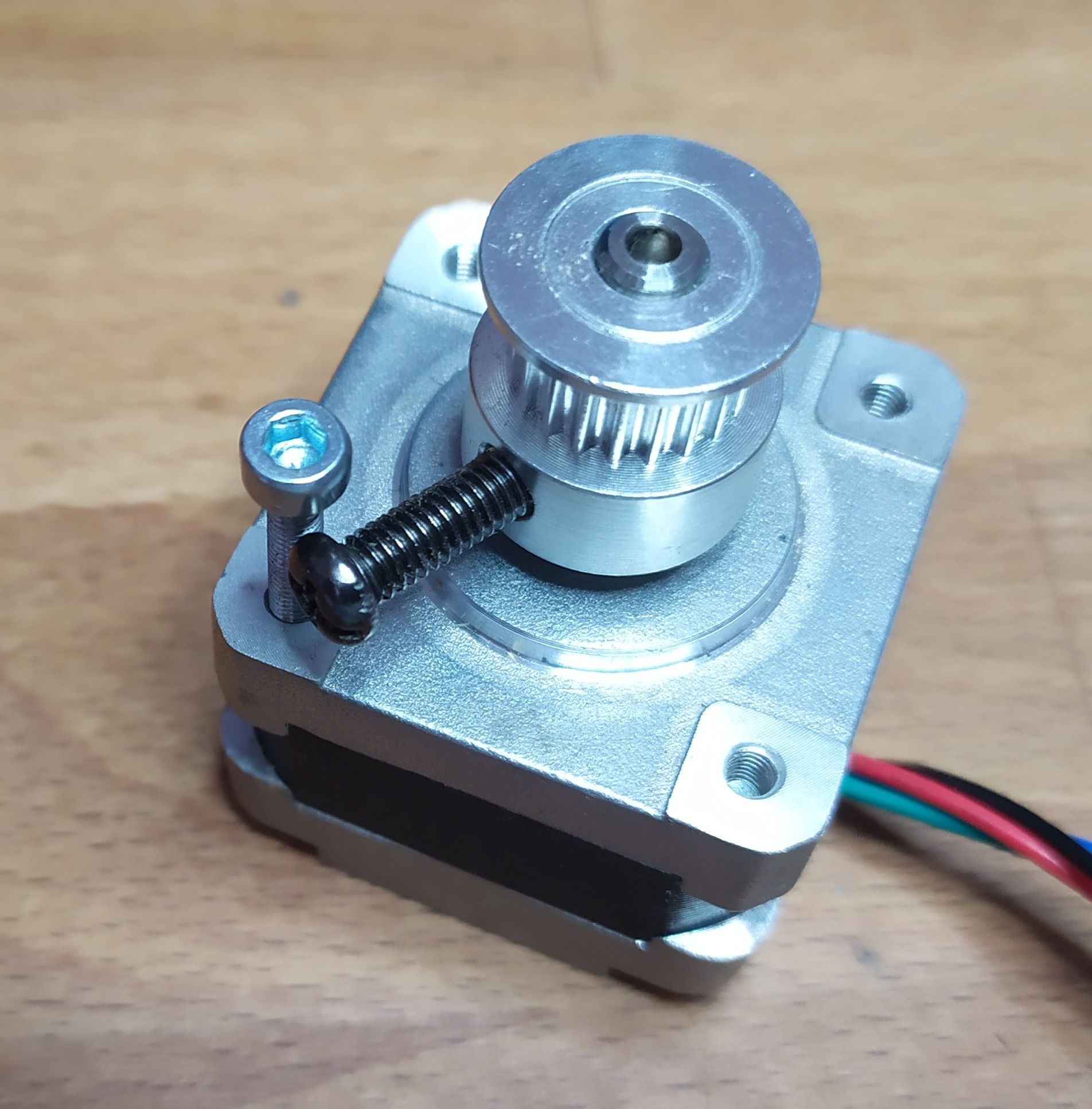
Hab's mir einfach gemacht :) Den schraubenkopf feil ich dann noch etwas flacher. Erst mal schauen wie das funktioniert. Motor ist vom treiber auf 100ma begrenzt. Die antenne hat 30 grad "aperture", sollte also kein problem sein.
:
Bearbeitet durch User
Georg schrieb: > Das kann doch garnicht passieren, wenn der Motor immer rechtsrum gegen > den Anschlag fährt und von da an nur nach links bis 360 Grad. 360° reicht für einen (vernünftigen) Antennenrotor nicht, es sei denn, man hat in einer Richtung einen Berg o.ä. davor.
Sebastion B. schrieb: > Ich brauche aber eine strategie damit das antennenkabel nicht > aufgewickelt wird. Hohlleiter statt Kabel ;)
Wolfgang schrieb: > 360° reicht für einen (vernünftigen) Antennenrotor nicht Ist dir bekannt wieviel Grad ein Kreis hat? Findet man sicher irgendwo im Internet. Georg
Ich würde ouf jeden Fall mit Positionsrückmeldung arbeiten, zumindest wenn es eine Aussenantenne ist. Geht schwerer bei Kälte, Windlast z.T in Böen auf der Antenne, vielleicht auch mal ein bisschen Eis. Schritte sind schnell verloren unter wechselnden Lasten. Im einfachsten Fall ein Poti (für 360° muss es dann ein 3Gang-Poti sein) was dann ein analoger Absolutwertgeber ist und in der Auflösung sicher reicht. Auch ein digitaler Incrementalgeber ist machbar, braucht dann eben irgendwie ein Referenzposition. Königsklasse ist natürlich ein digitaler Absolutwertgeber, brauchst du aber für eine Antenne nicht.
H.Joachim S. schrieb: > Im einfachsten Fall ein Poti (für 360° muss es dann ein 3Gang-Poti sein) Ich hab bestenfalls ein 10-gang spindel-poti, die kleinen blauen. Das verspricht zum mechanischen albtraum zu werden es sei denn die stepper achse schaut beidseitig raus. Muss den stepper mal auseinandernehmen.
Georg schrieb: > Ist dir bekannt wieviel Grad ein Kreis hat? Findet man sicher irgendwo > im Internet. Schon mal einen Antennenrotor benutzt? Dann wäre dir klar, dass ein Bereich von nur 360° für viele Zwecke nicht reicht. Sobald der Standort der Gegenstation nicht bekannt genau bekannt ist, kurbelt sich der Rotor einen Wolf, wenn er nur einen Vollkreis abdeckt.
Wolfgang schrieb: > Sobald der Standort der Gegenstation nicht bekannt ist, Die gegenstation ist ein LEO sat. Die fliegen mit 25'000 km/h vorbei. Doppler shift über 10khz. Da ist 360grad ziemlich störend wenn man realtime verfolgt. Aber es ist halt einfach.
Sebastion B. schrieb: > Ich hab bestenfalls ein 10-gang spindel-poti, Ich fürchte ich weiss was du meinst :-), damit wird das nichts. Vielleicht sollte man mal überlegen was aus dem Automobilbereich verwendbar wäre. Gibts oft günstig als Gebrauchtteile und sind i.a. Wetter- und Temperaturfest. Wie genau willst/musst du denn positionieren? Innen oder Aussen?
Sebastion B. schrieb: > Wolfgang schrieb: >> Sobald der Standort der Gegenstation nicht bekannt ist, > > Die gegenstation ist ein LEO sat. Die fliegen mit 25'000 km/h vorbei. Die Absolutgeschwindigkeit ist nur ein Parameter. Für die Winkelgeschwindigkeit kommt es zusätzlich auf die Entfernung und die Fallrichtung an. Ganz böse für die Anforderungen an die Drehgeschwindigkeit sind für den Azimutrotor (beinahe) Überkopfdurchgänge. Georg schrieb: > Ist dir bekannt wieviel Grad ein Kreis hat? Rate mal, warum kommerzielle Rotoren, wie z.B. der G-1000DXC einen Drehbereich von 450° haben. Das liegt bestimmt nicht daran, das die Ingenieure von Yeasu zu blöd sind, im Internet den Winkel für einen Vollkreis herauszufinden.
Sebastion B. schrieb: > Ich hab bestenfalls ein 10-gang spindel-poti, die kleinen blauen. Wenn es dir nur um die Begrenzung der Drehung geht, kannst du vielleicht eine Seilscheibe auf der Achse montieren. Die Wickelt bei Drehung ein Seil auf, dass zu einem Taster führt. Sobald das Seil sich strafft, wird der Taster betätigt. Über die Seillänge lässt sich der Drehbereich festlegen. Man muss nur durch entsprechende Führung dafür sorgen, dass das Seil immer sauber auf die Rolle läuft.
Zur Positionsfeststellung habe ich schon mal etwas an anderer Stelle vorgeschlagen: Beitrag "Re: Position von Lautstärke Poti "extern" messen - nicht mit dem selben Poti" Zur Signalübertragung könnte man einen Übertrager mit drehender Spule bauen. Die statische Wicklung sitzt außen herum. Gruß Jobst
@TO: Schaue Dir mal an wie bei einem 3x12pf Drehkondensator für einen UKW Tuner bewerkstelligt wird, das der sich exakt 1,5 Umdrehungen drehen läßt, evtl. kannst Du die Fippizistik nachempfinden. Gruß, Pille
Jobst M. schrieb: > Beitrag "Re: Position von Lautstärke Poti "extern" messen - nicht mit > dem selben Poti" Das hat eine schlechtere auflösung als ein stinknormaler 6-bit binärcode. Nut 48 schritte anstatt 64. Das taugt nix.
Wolfgang schrieb: > Rate mal, warum kommerzielle Rotoren, wie z.B. der G-1000DXC einen > Drehbereich von 450° haben Das errate ich nicht (ich bin dazu einfach zu blöd), aber du erklärst mir sicher gern für welche Himmelsrichtung man z.B. 400 Grad braucht um sie zu erreichen. Georg
Georg schrieb: > Das errate ich nicht (ich bin dazu einfach zu blöd), aber du erklärst > mir sicher gern für welche Himmelsrichtung man z.B. 400 Grad braucht um > sie zu erreichen. Für eine einzelne Himmelsrichtung nicht. Aber man möchte mit einem Antennenrotor ja vielleicht nicht nur eine Auswahl von Richtungen anpeilen, die ein- für allemal festgelegt und genau bekannt sind, sondern z-B. ein paar Grad hin- und herschwenken können, um die optimale Feineinstellung zu suchen. Wäre blöd, wenn man dabei gegen einen Anschlag knallt, nur weil man gerade 1° angepeilt hat. Also wären 365° Beweglichkeit schon praktisch. Eine weitere Anwendung ist das Verfolgen von bewegten Obkjekten, z.B. niedrigfliegenden Satelliten. Da möchte man dann einen kontinuierlichen Bereich von z.B. 60° und zwar in jeder beliebigen Richtung, weil es eben wieder blöd wäre, die Aktion mittendrin zu unterbrechen, weil der Antennenrotor erstmal eine Runde Ringelpietz tanzen muss, um über die 360°-Schwelle zu kommen. Und schon haben wir Bedarf für einen Drehbereich von 420°…
Georg schrieb: > Das errate ich nicht (ich bin dazu einfach zu blöd) ... Sehe ich auch so. Wie oben schon geschrieben, fehlt dir vermutlich jegliche Erfahrung mit Antennenrotoren im praktischen Einsatz.
MaWin schrieb: > Sebastion B. schrieb: >> Wie mach isch das? > > Egal, Anschlag spart Lichtschranke und deren Verkabelung. Ein mechanischer Anschlag ist nicht ganz trivial (aber auch kein Hexenwerk), sobald der Drehwinkel über 360 grd sein soll.
Angehängte Dateien:
-

volume_control.jpeg
65 KB
Sebastion B. schrieb: > Hab's mir einfach gemacht :) Abgekupfert hast Du!
Stefan ⛄ F. schrieb: > Das hat aber einen WAF Faktor von 0,0 Meinst sicher die Cli-Maxbegrenzung. Beim Motorschritt darf das natürlich nicht ;) was der TE mit dem Schrittmotor wirklich anstellt werden wir nie erfahren...
Zweiwattmist schrieb: > was der TE mit dem Schrittmotor wirklich anstellt werden wir nie > erfahren... Sgp4 auf esp8266. Das hier:
1 | 16:07:21 SetSAT: NORBI |
2 | 16:16:04 az: 244, el 0, dist 2662 |
3 | 16:16:14 az: 245, el 1, dist 2627 |
4 | 16:16:24 az: 247, el 1, dist 2594 |
5 | 16:16:34 az: 248, el 1, dist 2562 |
6 | 16:16:44 az: 250, el 2, dist 2532 |
7 | 16:16:54 az: 251, el 2, dist 2503 |
8 | 16:17:04 az: 253, el 2, dist 2476 |
9 | 16:17:14 az: 255, el 2, dist 2451 |
10 | 16:17:24 az: 256, el 3, dist 2427 |
11 | 16:17:34 az: 258, el 3, dist 2405 |
12 | 16:17:44 az: 260, el 3, dist 2385 |
13 | 16:17:54 az: 262, el 3, dist 2367 |
14 | 16:18:04 az: 263, el 3, dist 2351 |
15 | 16:18:14 az: 265, el 3, dist 2337 |
16 | 16:18:24 az: 267, el 4, dist 2325 |
17 | 16:18:34 az: 269, el 4, dist 2316 |
18 | 16:18:44 az: 271, el 4, dist 2308 |
19 | 16:18:54 az: 273, el 4, dist 2302 |
20 | 16:19:04 az: 275, el 4, dist 2299 |
21 | 16:19:14 az: 277, el 4, dist 2297 |
22 | 16:19:24 az: 279, el 4, dist 2298 |
23 | 16:19:34 az: 281, el 4, dist 2301 |
24 | 16:19:44 az: 282, el 4, dist 2306 |
25 | 16:19:54 az: 284, el 4, dist 2313 |
26 | 16:20:04 az: 286, el 4, dist 2323 |
27 | 16:20:14 az: 288, el 4, dist 2334 |
28 | 16:20:24 az: 290, el 3, dist 2348 |
29 | 16:20:34 az: 292, el 3, dist 2363 |
30 | 16:20:44 az: 294, el 3, dist 2380 |
31 | 16:20:54 az: 295, el 3, dist 2400 |
32 | 16:21:04 az: 297, el 3, dist 2421 |
33 | 16:21:14 az: 299, el 2, dist 2444 |
34 | 16:21:24 az: 300, el 2, dist 2469 |
35 | 16:21:34 az: 302, el 2, dist 2495 |
36 | 16:21:44 az: 304, el 2, dist 2523 |
37 | 16:21:54 az: 305, el 1, dist 2553 |
38 | 16:22:04 az: 307, el 1, dist 2585 |
39 | 16:22:14 az: 308, el 1, dist 2617 |
40 | 16:22:24 az: 310, el 0, dist 2651 |
41 | 16:22:34 az: 311, el 0, dist 2687 |
:
Bearbeitet durch User
Stefan ⛄ F. schrieb: > Das hat aber einen WAF Faktor von 0,0 Kann nicht sein. Selbst der MAF ist schon negativ! Zweiwattmist schrieb: > volume_control.jpeg Eiii .... das schmerzt ganz schön! Gruß Jobst
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.