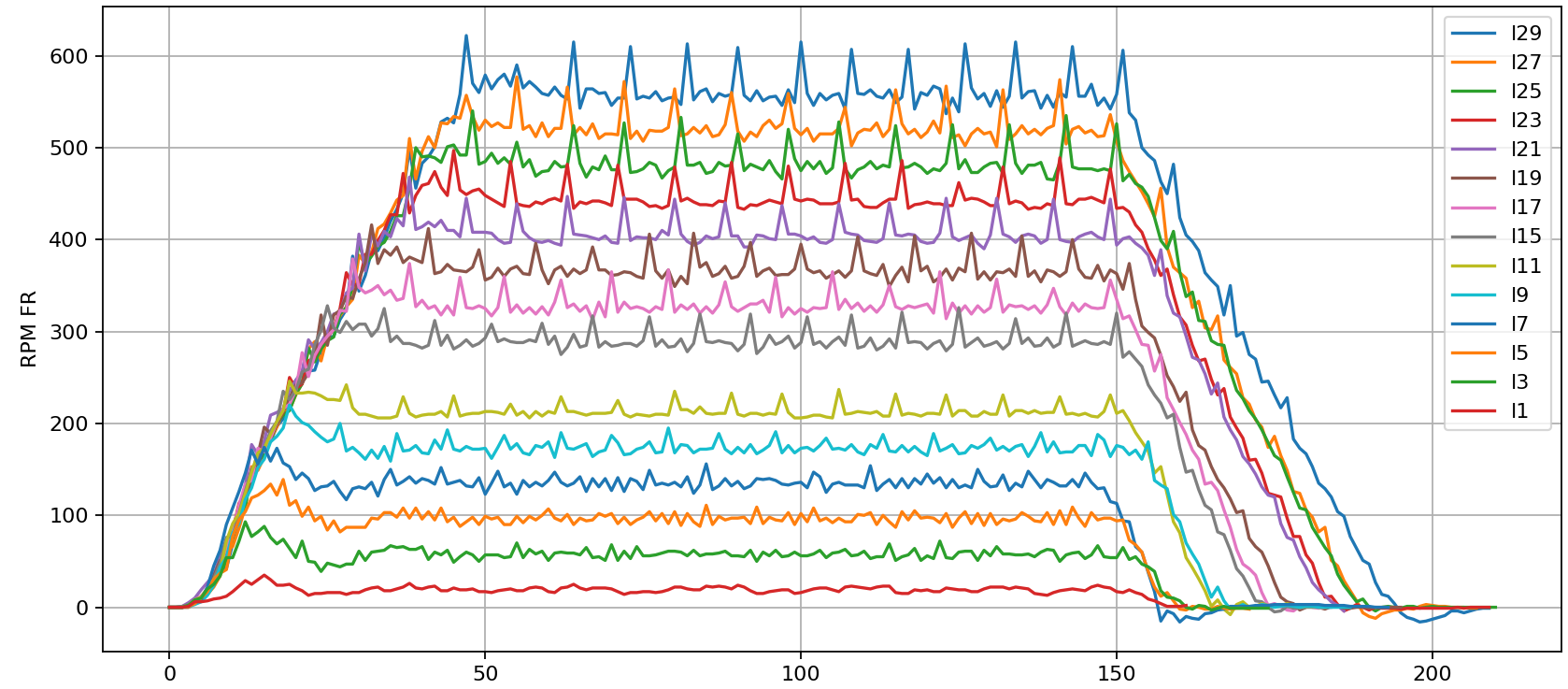
Hallo zusammen, ich habe einen fahrenden Roboter mit vier Rädern und jeweils einem Gleichstrommotor pro Rad (laut Hersteller "bürstenlos"). Der Roboter wird durch einen Controller gesteuert, welcher von extern einen Vektor empfängt und in Radumdrehungen umrechnet und den Roboter damit beschleunigt. All dies ist eine unbekannte Blackbox. Das Einzige was ich messen kann sind Radumdrehungen (RPM) und die Geschwindigkeit des Roboters, jedoch keine Spannungen etc. Folgende Frage: Kann man nur durch Betrachtung des Roboters oder gezielten Tests erkennen wie das System bremst? Damit meine ich ob eine Gegenstrom-, Gleichstrom- oder Generatorbremsung vorliegt? Gibt es gewisse Verhaltensweisen, welche für oder gegen ein spezielles Verfahren sprechen? Die Drehzahl verringert sich praktisch linear bis das Rad letztendlich zum stehen kommt (Von 600 RPM auf 0 werden ca. 0,8 sek benötigt, von 200 auf 0 in ca. 0,2-0,3 sek). Steht der Roboter still und schiebt man ihn ganz langsam an, dann merkt man einen geringen Widerstand, kann ihn aber fast problemlos schieben. Die Räder drehen dabei gleichmäßig. Je stärker man jedoch schiebt, desto stärker fühlt sich der Widerstand an. In diesem Zustand drehen sich die Räder nicht mehr frei sondern "Ruckeln", d.h. drehen sich kurz, bremsen wieder, drehen kurz, bremsen wieder. Hier wäre eine Vermutung von mir, dass es sich um eine Gleichstrombremsung handelt und das Ruckeln davon kommt, wenn ich Ständer und Anker weit genug aus einander drehe, so dass der Anker sich neu ausrichtet. Ich kann jedoch für mich nicht beantworten, ob die Bremsung aus der Fahrt oder im Stand unterschiedlich sind und wie weit der Controller dort "Magie" anwendet. Daher wäre ich an einer offenen Diskussion und Ideen, Hinweisen etc. interessiert und sehr dankbar :) PS: Wer sich dafür interessiert: Die X-Achse des beigefügten Diagramms entsprechen dem jeweiligen Messpunkt. 50 Messpunkte = 1 Sek (50 Hz)
Angehängte Dateien:
-

Verhalten.png
290 KB
Jim B. schrieb: > In diesem Zustand drehen sich die Räder nicht mehr frei sondern > "Ruckeln", d.h. drehen sich kurz, bremsen wieder, drehen kurz, bremsen > wieder. Klingt nach Choppern. Dabei werden Windungen des Motors gezielt kurzgeschlossen und wieder freigegeben. Das scheint aber mehr eine Wegrollsperre zu sein, denn beim Verzögern des Robbies würde Choppern unnötig ruckeln.
Ah danke, das kann natürlich auch sein. Würde natürlich unglücklicherweise heißen, dass Bremsen und "Wegrollsperre" zwei unterschiedliche Prozesse sind.
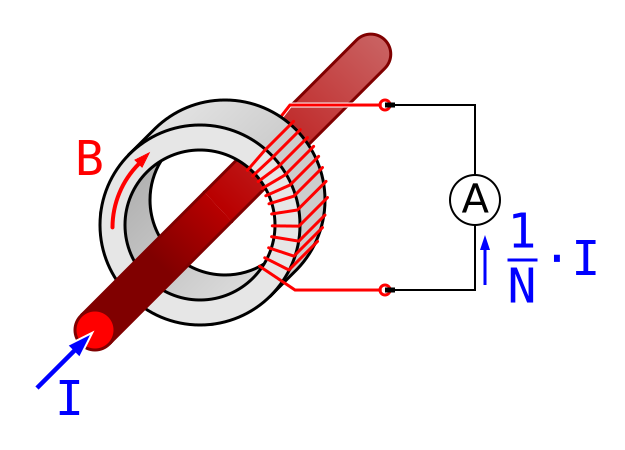
Wickel dünnen Kupferlackdraht um die Zuleitung des Motors. 10-100 Runden. Geh auf einen Widerstand zb. 10k. Dort dann mit Oszi ran und du siehst den Strom zum/vom Motor.
Jim B. schrieb: > Würde natürlich > unglücklicherweise heißen, dass Bremsen und "Wegrollsperre" zwei > unterschiedliche Prozesse sind. Nö, nicht unbedingt. Du kannst ja sanft choppern, indem du mit schmalen Impulsen den 'Kurzschluss' nur wenig wirken lässt. Willst du mehr verzögern, machst du die Pulse breiter. Das ist natürlich auch eine Frage der Endstufe - die muss den Kurzschlussstrom schon aushalten. Generell wird beim Bremsen vermutlich erstmal der Freilauf aktiviert und dann nach gewünschter Bremskurve variabel gechoppert. Rekuperation ist ja vermutlich nicht vorgesehen.
Matthias S. schrieb: > und > dann nach gewünschter Bremskurve variabel gechoppert. Rekuperation ist > ja vermutlich nicht vorgesehen. Ist da aus Sicht des Motors ein Unterschied? Ich denke, die Spannung, die am Motor anliegt, beim Bremsen, ist unterschiedlich. z.B. 4,8V Akkuspannung + mosfet drop z.B. 2*0,5V ("Brückengleichrichter" aus mosfets) oder aber 1V mosfet drop + 0.1V Kabeldrop (Kurzschluss). Da URI und PUI respektiert werden müssen, fliesst dann weniger Strom, wenn die Spannung höher. Ändert das aber etwas an der Bremsleistung? Braucht man zum "perfekten" Bremsen eine Art MPPT?
von Keiler schrieb: >Wickel dünnen Kupferlackdraht um die Zuleitung des Motors. 10-100 >Runden. Geh auf einen Widerstand zb. 10k. Dort dann mit Oszi ran und du >siehst den Strom zum/vom Motor. Damit kann man aber kein Strom detektieren, der Drat ist ja dann rechtwinklig zur Zuleitung. Oder soll das eine Kapazitive Kopplung sein? Die detektiert dann aber nur Wechselspannung. Ein Draht in gleicher Richtung wie die Zuleitung würde einen Wechselstrom detektieren. Am besten einen niederohmigen Stromfühlerwiderstand in die Leitung einfügen, damit kann man dann Gleich- und Wechselstrom detektieren.
Günter Lenz schrieb: > Oder soll das eine > Kapazitive Kopplung sein? Nein, Infos dazu unter "Stromwandler".
Jim B. schrieb: > Damit meine ich ob eine Gegenstrom-, Gleichstrom- oder Generatorbremsung > vorliegt? Gibt es gewisse Verhaltensweisen, welche für oder gegen ein > spezielles Verfahren sprechen? Gar keine elektrische Bremsung, da die Getriebe eh fast selbsthemmend sind? Die Aufgabenstellung klingt allerdings völlig abstrus. Wenn du nicht mal Spannungen an den Motoren messen kannst oder darfst, wer will da wissen, wie das Ding genau bremst, und vor allem: warum? Oliver
:
Bearbeitet durch User
Oliver S. schrieb: > Die Aufgabenstellung klingt allerdings völlig abstrus. Wenn du nicht mal > Spannungen an den Motoren messen kannst oder darfst, wer will da wissen, > wie das Ding genau bremst, und vor allem: warum? Meine Frage zielte ja auch darauf ab, ob man es erkennen kann, wie das System bremst. Also ob es überhaupt möglich ist. Wenn dies nicht möglich ist, dann ist dies so und beantwortet meine Frage. Ich kenne mich mit der Materie zu wenig aus bzw. habe das erste Mal überhaupt Kontakt damit. Mir fehlt die Expertise um zu wissen, ob man vllt. einfach am Verhalten erkennen kann, welche Technik möglicherweise eingesetzt wird. Matthias kam ja alleine aufgrund der Beschreibung beim Anschieben mit "Choppern". Natürlich ist dies nicht verlässlich und belegt aber es ist zumindest eine Idee, die mit dem Verhalten auch technisch begründet wurde. Darum geht es mir. Ziel ist es nicht die Blackbox durch weitere Messungen zur Whitebox zu machen sondern die Beantwortung der Frage, ob man es anhand der vorliegenden Daten irgendwie Eingrenzen bzw. Verfahren komplett ausschließen kann. Ich kann halt mit dem Ding weitere Messungen machen, solang ich den Roboter nicht modifiziere. Sei es nun temporär oder permanent. Ist dies nicht möglich, dann ist das ja eine valide Antwort.
Keiler schrieb: > Nein, Infos dazu unter "Stromwandler". Nein, das ist ganz sicher kein Stromwandler. Beim Stromwandler liegen die Drähte parallel zueinander. Die Messseite mit veilen Wicklungen, aber nicht um den Primärdraht gewickelt. Sondern um einen Ringkern, damit die magentische Kopplung besser ist. Auch bei einer Rogowski-Spule wird das nicht um den Primärdraht gewickelt.
Bentschie schrieb: > Die Messseite mit veilen Wicklungen, > aber nicht um den Primärdraht gewickelt. Sondern um einen Ringkern, > damit die magentische Kopplung besser ist. Primär durch den Ring und die Vielen auch durch den Ring. Der Ring verbessert die Kopplung. Wo ist der Unterschied, ausser schlechterer Kopplung, wenn da kein Ring drin ist?
Angehängte Dateien:
{kind=link}
Keiler schrieb: > Bentschie schrieb: >> Die Messseite mit veilen Wicklungen, >> aber nicht um den Primärdraht gewickelt. Sondern um einen Ringkern, >> damit die magentische Kopplung besser ist. > > Primär durch den Ring und die Vielen auch durch den Ring. Der Ring > verbessert die Kopplung. > Wo ist der Unterschied, ausser schlechterer Kopplung, wenn da kein Ring > drin ist? Das die vielen parallel zum Primärdraht liegen und nicht rechtwinklig, wenn sie um den Primärdraht gewickelt wären. Siehe Bilder auf: https://de.wikipedia.org/wiki/Stromwandler
Jim B. schrieb: > Meine Frage zielte ja auch darauf ab, ob man es erkennen kann, wie das > System bremst. Die Antwort ist: nein, kannst du nicht. Oliver
> Bremstechnik eines Gleichstrommotors durch "Beobachtung" erkennbar?
Ja, mit aktuell kalibrierter Glaskugel.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.